【備忘録】 micro-ROS の micro_ros_agent と micro-ROS static library の作り方 [ロボット]

環境は、Ubuntu 22.04 LTS で ROS2 のバージョンは humble です。
Teensy with Arduino
Creating custom static micro-ROS library
■ micro_ros_setup の設定
micro_ros_agent と micro-ROS static library をビルドするための micro_ros_setup の環境を設定します。
# Source the ROS 2 installation source /opt/ros/$ROS_DISTRO/setup.bash # Create a workspace and download the micro-ROS tools mkdir microros_ws cd microros_ws git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup # Update dependencies using rosdep sudo apt update && rosdep update rosdep install --from-paths src --ignore-src -y # Install pip if you need sudo apt-get install python3-pip # Build micro-ROS tools and source them colcon build source install/local_setup.bash
■ micro_ros_agent のビルド
micro_ros_agent のビルド環境をダウンロードし、ビルドします。
# Download micro-ROS agent packages ros2 run micro_ros_setup create_agent_ws.sh # Build micro_ros_agent ros2 run micro_ros_setup build_agent.sh source install/local_setup.bash
私の環境では、次のエラー出てビルドが失敗してしまいました。
$HOME/microros_ws/src/uros/micro-ROS-Agent/micro_ros_agent/src/agent/graph_manager/graph_typesupport.cpp:47:54: error: cannot bind non-const lvalue reference of type ‘bool&’ to a value of type ‘char’
47 | m_typeSize = 4 + callbacks_->max_serialized_size(full_bounded);
| ^~~~~~~~~~~~
$HOME/microros_ws/src/uros/micro-ROS-Agent/micro_ros_agent/src/agent/graph_manager/graph_typesupport.cpp:139:54: error: cannot bind non-const lvalue reference of type ‘bool&’ to a value of type ‘char’
139 | m_typeSize = 4 + callbacks_->max_serialized_size(full_bounded);
|
これは次のファイルの47行目と139行目を次のように変更したらビルドが通りました。
$HOME/microros_ws/src/uros/micro-ROS-Agent/micro_ros_agent/src/agent/graph_manager/graph_typesupport.cpp
46 // char full_bounded; 47 bool full_bounded; .... 139 // char full_bounded; 140 bool full_bounded; ....
micro_ros_agent は次のコマンドで起動することができます。
# run micro_ros_agent by a serial communication ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0
■ micro-ROS static library の環境準備
micro-ROS static library の開発環境をダウンロードします。
# Download micro-ROS firmware packages ros2 run micro_ros_setup create_firmware_ws.sh generate_lib
ビルドするための設定ファイルを2つ作成します。
touch my_custom_toolchain.cmake touch my_custom_colcon.meta
それぞれのファイルの設定例を示します。今回はSPRESENSEを前提とした設定ファイルです。
my_custom_colcon.meta
{
"names": {
"tracetools": {
"cmake-args": [
"-DTRACETOOLS_DISABLED=ON",
"-DTRACETOOLS_STATUS_CHECKING_TOOL=OFF"
]
},
"rosidl_typesupport": {
"cmake-args": [
"-DROSIDL_TYPESUPPORT_SINGLE_TYPESUPPORT=ON"
]
},
"rcl": {
"cmake-args": [
"-DBUILD_TESTING=OFF",
"-DRCL_COMMAND_LINE_ENABLED=OFF",
"-DRCL_LOGGING_ENABLED=OFF"
]
},
"rcutils": {
"cmake-args": [
"-DENABLE_TESTING=OFF",
"-DRCUTILS_NO_FILESYSTEM=OFF",
"-DRCUTILS_NO_THREAD_SUPPORT=OFF",
"-DRCUTILS_NO_64_ATOMIC=ON",
"-DRCUTILS_AVOID_DYNAMIC_ALLOCATION=ON"
]
},
"microxrcedds_client": {
"cmake-args": [
"-DUCLIENT_PIC=OFF",
"-DUCLIENT_PROFILE_UDP=OFF",
"-DUCLIENT_PROFILE_TCP=OFF",
"-DUCLIENT_PROFILE_DISCOVERY=OFF",
"-DUCLIENT_PROFILE_SERIAL=OFF",
"-UCLIENT_PROFILE_STREAM_FRAMING=ON",
"-DUCLIENT_PROFILE_CUSTOM_TRANSPORT=ON"
]
},
"rmw_microxrcedds": {
"cmake-args": [
"-DRMW_UXRCE_MAX_NODES=1",
"-DRMW_UXRCE_MAX_PUBLISHERS=5",
"-DRMW_UXRCE_MAX_SUBSCRIPTIONS=5",
"-DRMW_UXRCE_MAX_SERVICES=1",
"-DRMW_UXRCE_MAX_CLIENTS=1",
"-DRMW_UXRCE_MAX_HISTORY=4",
"-DRMW_UXRCE_TRANSPORT=custom"
]
}
}
}
my_custom_toolchain.cmake
set(CMAKE_SYSTEM_NAME Generic)
set(CMAKE_CROSSCOMPILING 1)
set(CMAKE_TRY_COMPILE_TARGET_TYPE STATIC_LIBRARY)
# SET HERE THE PATH TO YOUR C99 AND C++ COMPILERS
set(CMAKE_C_COMPILER $ENV{TOOLCHAIN_PREFIX}gcc)
set(CMAKE_CXX_COMPILER $ENV{TOOLCHAIN_PREFIX}g++)
set(NUTTX_INCLUDE_DIR "$ENV{HOME}/.arduino15/packages/SPRESENSE/tools\
/spresense-sdk/3.0.1/spresense/release/nuttx/include")
set(ARDUINO_INCLUDE_DIR "$ENV{HOME}/.arduino15/packages/SPRESENSE/hardware/\
spresense/3.0.1/cores/spresense")
set(CMAKE_C_COMPILER_WORKS 1 CACHE INTERNAL "")
set(CMAKE_CXX_COMPILER_WORKS 1 CACHE INTERNAL "")
# SET HERE YOUR BUILDING FLAGS
set(FLAGS "-c -fno-builtin -mabi=aapcs -Wall -fno-strict-aliasing -Os \
-fno-strength-reduce -fomit-frame-pointer -mcpu=cortex-m4 -mfpu=fpv4-sp-d16 \
-mfloat-abi=hard -mthumb -nostdlib -pipe -ggdb -gdwarf-3 -ffunction-sections \
-fdata-sections -DCONFIG_WCHAR_BUILTIN -DCONFIG_HAVE_DOUBLE -D__NuttX__ \
-D'RCUTILS_LOG_MIN_SEVERITY=RCUTILS_LOG_MIN_SEVERITY_NONE\
'" CACHE STRING "" FORCE)
set(CMAKE_C_FLAGS_INIT "-w -MMD -std=gnu11 ${FLAGS} -DCLOCK_MONOTONIC=0 \
-D'__attribute__(x)='" CACHE STRING "" FORCE)
set(CMAKE_CXX_FLAGS_INIT "-w -MMD -std=gnu++11 ${FLAGS} -fno-exceptions \
-fno-rtti -fpermissive -DCLOCK_MONOTONIC=0 \
-D'__attribute__(x)='" CACHE STRING "" FORCE)
include_directories(BEFORE SYSTEM ${NUTTX_INCLUDE_DIR} ${ARDUINO_CINLUDE_DIR})
set(__BIG_ENDIAN__ 0)
$TOOLCHAIN_PREFIX は、".bashrc"の中で定義されています。
.bashrc
export TOOLCHAIN_PREFIX='$HOME/.arduino15/packages/ SPRESENSE/tools/gcc-arm-none-eabi/9.2.1/linux/bin/arm-none-eabi-'
micro-ROS static library をビルドします。
# Build micro-ROS static library ros2 run micro_ros_setup build_firmware.sh $(pwd)/my_custom_toolchain.cmake $(pwd)/my_custom_colcon.meta
ビルドに成功すると、次の場所に static library と必要な include ファイルが生成されます。
firmware/build/libmicroros.a
firmware/include
これでひととおり micro-ROS で開発する環境を整えることができました!
")
ロボットプログラミングROS2の実装・実践 -実用ロボットの開発- (設計技術シリーズ96)
- 作者: 内木場 文男
- 出版社/メーカー: 科学情報出版株式会社
- 発売日: 2021/07/21
- メディア: 単行本

ROS2の基礎とJetBotの制御: ROS2 Foxyを使ったプログラミング
- 作者: 大西和則
- 出版社/メーカー:
- 発売日: 2021/06/19
- メディア: Kindle版
ROS2/Humble で Turtlebot3 Navigation がうまく動かなかった話 [ロボット]
最近は、ROS2/micro-ROS をさわりはじめています。ROSとは「Robot OS」の略で、ホストPCとロボット間の通信や、ロボットから送られるセンシングデータを使ってホストPC側で、SLAM や Navigation などを行えるライブラリならびにツール群です。
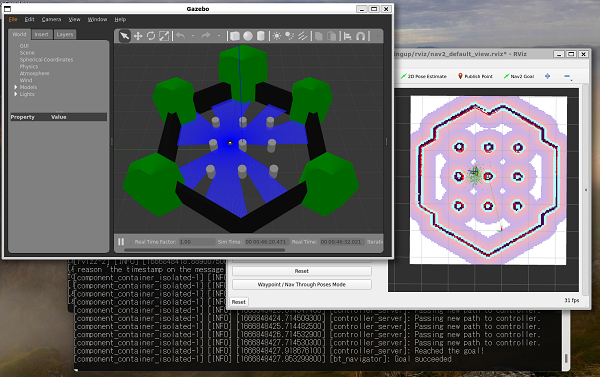
こちらの記事を参照して、ROS2/humble を使って Turtlebot3 のナビゲーションのシミュレーションを試そうと思ったのですが、うまく動きません。具体的には、SLAMで作成した地図が rviz2 で表示されないのです。
#上の画像はうまくいったあとの画像です。
エラーメッセージを手がかりに、いろいろと調べてようやくたどり着いた解決方法がこちら。
AMCL failing when starting Navigation Simulation
https://github.com/ROBOTIS-GIT/turtlebot3/issues/884
具体的には、"/opt/ros/humble/share/turtlebot3_navigation2/param/burger.yaml" の中の "robot_model_type" を変更すれば回避できます。
|
変更前:robot_model_type:"differential" 変更後:robot_model_type: "nav2_amcl::DifferentialMotionModel" |
Github の Issues で解決策が見つかるあたり、まだまだ発展途上のプラットフォームですね。ただ可能性を感じるテクノロジーですので、これから追いかけていきたいと思います。
(^^)/~
")
ROS2とPythonで作って学ぶAIロボット入門 (KS理工学専門書)
- 出版社/メーカー: 講談社
- 発売日: 2022/09/01
- メディア: 単行本(ソフトカバー)
")
- 作者: 岡田 浩之
- 出版社/メーカー: 科学情報出版
- 発売日: 2022/10/07
- メディア: Kindle版
【悲報】SPR倒立振子の反省点途中まとめ(+モータードライバ死亡(´;ω;`)) [ロボット]
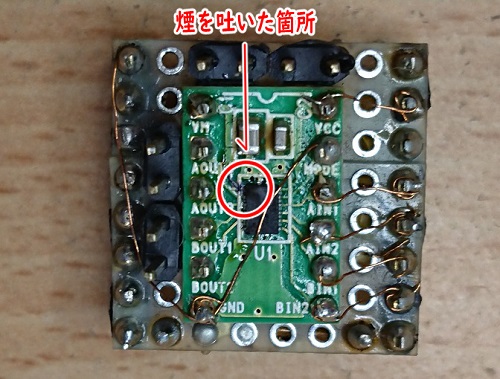
今、手持ちの予備のモータードライバはなく、相変わらず私はテレワークなので、買い出しに行くきっかけもなく、しばらくお預けになりそうです。惜しいところまで来たのですが残念。
ただ、ここで倒立振り子を作る上での注意点ならびに設計の肝が分かってきたので、少しまとめたいと思います。
■ 倒立振子の重心は下のほうに!
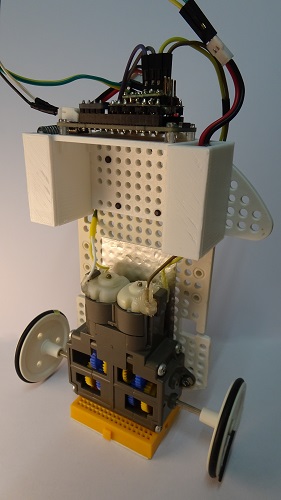
メカを検討する際は倒立振り子の重心は下の方にいくようにしましょう。私の機体は上に回路やバッテリなどを当初置くようにしていたのですが、トップヘビーになりすぎてバランスがとれませんでした。
冷静に考えればすぐに分かるのですが、重心に上にあると倒れるときの速度が早く、反応の鈍いDCモーターでは追従できません。センサーの反応が早くてもモーターが反応できないので制御はできません。
■ センサーの位置は重心近くに!
センサーの位置が上にあると、倒れるときに加速度センサーの値が大きくなり、制御が過剰に反応します。倒立振子の場合、細かい角度に反応するようにするためPIDの係数は大きくなりがちです。そのため、ちょっとの変化に大きく反応してしまいます。
重心に近ければ加速度センサーではなくジャイロの変化が支配的になるので、制御しやすくなります。
■ DCモーターには電圧可変出力のモータードライバで
今回、DCモーターの制御はFETを経由してPWMで出力するドライバを使いました。PWMだと微小な値の場合、DCモーターを起動する電力が不足するため、最初に十分な電圧を加え、その後、パルスを送るようにする必要がありました。
このような制御だと連続して前後に変化する値の場合は、DCモーターの反応が悪いので一瞬ブレーキがかかるようになってしまい、スムーズな動きを実現するのは極めて難しかったです。
またモータードライバとPWMの関係もリニアではないため、非線形にモーターを制御する必要があります。倒立振子のように微妙なバランスを取るために微小パワーで正負制御する用途には向かないようです。
DCモーターを制御する場合は、DRV8830のようにインターフェースから数値を指定して出力電圧を変化させるモータードライバを選択したほうが無難かも知れません。
■ 制御間隔を短くすればいいもんでもない
DCモーターは反応が悪いです。ですのでセンサー処理がいくら早くフィードバックしてもモーターがついてこれません。今回使ったモータードライバはモーターの駆動に癖があるのでそれで時間がかかってしまいます。
また、逆方向に動かそうとしても、PWMでは慣性力をはるかに上回るパワー(パワー0になる期間があるため)が伝えられないため、俊敏に動かせません。モータードライバの癖にあわせて制御間隔を調整する必要がありそうです。
■ PID制御式の選択
今回は、PID制御の式は次の2種類について試してみました。
一般的なPID制御式
\[
Power(t) = KP (\theta (t) - offset) + KD \int_0^t (\theta(t) - offset)\,dt + KI \frac{d (\theta(t) - offset)}{dt}\
\]
センサー値を使ったPID制御式
\[
Power(t) = K1 (\theta(t) - offset) + K2 \omega(t) + K3 \nu(t) + K4 \int_0^t \nu(t)\,dt
\]
ここでθは車体の傾き。オフセットは傾きの初期値、ω は角速度、v は並進速度になります。
両方ためしてみたのですが、どうもセンサー値を使ったPIDの制御式のほうが安定するようです。ただ、センサー値に敏感に反応するのでセンサーは重心に近いところに置いたほうが無難です。
■ フィルターはMadgwickのほうが良い?
SPRESENSEはサブコアがあるのでフィルタ処理は計算し放題だったので、Kalman、Madgwick、Complemntary の三種類を同時に処理して値を返すようにしました。
Kalmanフィルターは遅延があるので、トップヘビー+FET型モータードライバというハンディキャップがある中ではかなり苦しみました。
Madgwickフィルターは微小な変化には反応が早いので倒立振子には向いてそうです。ただ、大きな変化では収束に時間がかかるので、扱いにはやや注意が必要です。
以上の反省点をふまえ、SPR倒立振子2を検討したいと思います!
( ・ิω・ิ)

- 作者: 大西 和則
- 出版社/メーカー:
- 発売日: 2019/08/21
- メディア: Kindle版

OSOYOO アルデュイーノ UNO R3 二輪自立 ロボット カー プログラミング 教育 スターター キット Android 対応
- 出版社/メーカー: オソヨー(OSOYOO)
- メディア: おもちゃ&ホビー
![倒立振子制御学習用ロボット ビュートバランサー2 [学習教材] [vstone]](https://m.media-amazon.com/images/I/41KP-aQvLLL._SL160_.jpg "倒立振子制御学習用ロボット ビュートバランサー2 [学習教材] [vstone]")
倒立振子制御学習用ロボット ビュートバランサー2 [学習教材] [vstone]
- 出版社/メーカー: Vstone(ヴイストン株式会社)
- メディア:
【SPRESENSE】BMI160用のセンサーフュージョン・フィルターを検討する(2) [ロボット]
Processingで作ったプログラムのグラフィック画面を次のようにしてみました。
-e2550.png)
Spresense のスケッチは次のようなものです。前回のものと出力形式以外は全く変わっていません。
#include <Wire.h>
#include <math.h>
#include <BMI160Gen.h>
#include <Kalman.h>
#include <MadgwickAHRS.h>
#define PRINT_PROCESSING
#define BAUDRATE 115200
#define SENSE_RATE 100
#define GYRO_RANGE 250
#define ACCL_RANGE 2
#define deg_to_rad(a) (a/180*M_PI)
#define rad_to_deg(a) (a/M_PI*180)
Kalman kalmanRoll;
Kalman kalmanPitch;
Madgwick madgwick;
float convertRawGyro(int gRaw) {
// ex) if the range is +/-500 deg/s: +/-32768/500 = +/-65.536 LSB/(deg/s)
float lsb_omega = float(0x7FFF) / GYRO_RANGE;
return gRaw / lsb_omega; // deg/sec
}
float convertRawAccel(int aRaw) {
// ex) if the range is +/-2g ; +/-32768/2 = +/-16384 LSB/g
float lsb_g = float(0x7FFF) / ACCL_RANGE;
return aRaw / lsb_g;
}
static float gyro_roll = 0, gyro_pitch = 0, gyro_yaw = 0;
static float comp_roll = 0, comp_pitch = 0;
static unsigned long last_mills = 0;
void print_roll_pitch()
{
// read raw accl measurements from device
int rawXAcc, rawYAcc, rawZAcc; // x, y, z
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
float accX = convertRawAccel(rawXAcc);
float accY = convertRawAccel(rawYAcc);
float accZ = convertRawAccel(rawZAcc);
float rad_a_roll = atan2(accY, accZ);
float rad_a_pitch = atan2(-accX, sqrt(accY*accY + accZ*accZ));
float accl_roll = rad_to_deg(rad_a_roll);
float accl_pitch = rad_to_deg(rad_a_pitch);
// read raw gyro measurements from device
int rawRoll, rawPitch, rawYaw; // roll, pitch, yaw
BMI160.readGyro(rawRoll, rawPitch, rawYaw);
float omega_roll = convertRawGyro(rawRoll);
float omega_pitch = convertRawGyro(rawPitch);
float omega_yaw = convertRawGyro(rawYaw);
unsigned long cur_mills = micros();
unsigned long duration = cur_mills - last_mills;
last_mills = cur_mills;
double dt = duration / 1000000.0; // us->s
if (dt > 0.1) return;
// Gyro data
gyro_roll += omega_roll * dt; // (ms->s) omega x time = degree
gyro_pitch += omega_pitch * dt;
gyro_yaw += omega_yaw * dt;
// Complementary filter data
comp_roll = 0.93 * (comp_roll + omega_roll * dt) + 0.07 * accl_roll;
comp_pitch = 0.93 * (comp_pitch + omega_pitch * dt) + 0.07 * accl_pitch;
// Kalman filter data
float kalm_roll = kalmanRoll.getAngle(accl_roll, omega_roll, dt);
float kalm_pitch = kalmanPitch.getAngle(accl_pitch, omega_pitch, dt);
// Madgwick filter data
madgwick.updateIMU2(omega_roll, omega_pitch, omega_yaw, accX, accY, accZ, dt);
// madgwick.updateIMU(omega_roll, omega_pitch, omega_yaw, accX, accY, accZ);
float madw_roll = madgwick.getRoll();
float madw_pitch = madgwick.getPitch();
float madw_yaw = madgwick.getYaw();
#ifdef PRINT_PROCESSING
static int n = 0;
if (n != 50) {
++n; return;
}
n = 0;
Serial.print(accl_roll);
Serial.print(",");
Serial.print(accl_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
Serial.print(gyro_roll);
Serial.print(",");
Serial.print(gyro_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
Serial.print(comp_roll);
Serial.print(",");
Serial.print(comp_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
Serial.print(kalm_roll);
Serial.print(",");
Serial.print(kalm_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
Serial.print(madw_roll);
Serial.print(",");
Serial.print(madw_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
#endif
Serial.println();
}
void setup() {
Serial.begin(115200);
BMI160.begin(BMI160GenClass::I2C_MODE);
madgwick.begin(SENSE_RATE);
BMI160.setGyroRate(SENSE_RATE);
BMI160.setAccelerometerRate(SENSE_RATE);
BMI160.setGyroRange(GYRO_RANGE);
BMI160.setAccelerometerRange(ACCL_RANGE);
BMI160.autoCalibrateGyroOffset();
BMI160.autoCalibrateAccelerometerOffset(X_AXIS, 0);
BMI160.autoCalibrateAccelerometerOffset(Y_AXIS, 0);
BMI160.autoCalibrateAccelerometerOffset(Z_AXIS, 1);
delay(100);
/* Set kalman and gyro starting angle */
int rawXAcc, rawYAcc, rawZAcc;
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
float accX = convertRawAccel(rawXAcc);
float accY = convertRawAccel(rawYAcc);
float accZ = convertRawAccel(rawZAcc);
float roll = rad_to_deg(atan(accY / accZ));
float pitch = rad_to_deg(atan(-accX / sqrt(accY * accY + accZ * accZ)));
// Set starting angle
kalmanRoll.setAngle(roll);
kalmanPitch.setAngle(pitch);
gyro_roll = comp_roll = roll;
gyro_pitch = gyro_pitch = pitch;
}
void loop() {
print_roll_pitch();
}
Processing のスケッチは次のようになっています。
import processing.serial.*;
Serial myPort; // Create object from Serial class
float [] Acc = new float[3];
float [] Gyr = new float[3];
float [] Cmp = new float[3];
float [] Klm = new float[3];
float [] Mdw = new float[3];
int lf = 10; // 10 is '\n' in ASCII
byte[] inBuffer = new byte[1024];
PFont font;
final int VIEW_SIZE_X = 1100, VIEW_SIZE_Y = 600;
void settings() {
size(VIEW_SIZE_X, VIEW_SIZE_Y, P3D);
}
void setup() {
myPort = new Serial(this, "COM15", 115200);
font = loadFont("CourierNew36.vlw");
}
void readSensors() {
if(myPort.available() > 0) {
if (myPort.readBytesUntil(lf, inBuffer) > 0) {
String inputString = new String(inBuffer);
String [] inputStringArr = split(inputString, ',');
Acc[0] = float(inputStringArr[0]);
Acc[1] = float(inputStringArr[1]);
Acc[2] = float(inputStringArr[2]);
Gyr[0] = float(inputStringArr[3]);
Gyr[1] = float(inputStringArr[4]);
Gyr[2] = float(inputStringArr[5]);
Cmp[0] = float(inputStringArr[6]);
Cmp[1] = float(inputStringArr[7]);
Cmp[2] = float(inputStringArr[8]);
Klm[0] = float(inputStringArr[9]);
Klm[1] = float(inputStringArr[10]);
Klm[2] = float(inputStringArr[11]);
Mdw[0] = float(inputStringArr[12]);
Mdw[1] = float(inputStringArr[13]);
Mdw[2] = float(inputStringArr[14]);
}
}
}
void normalize3DVec(float [] vector) {
float R;
R = sqrt(vector[0]*vector[0] + vector[1]*vector[1] + vector[2]*vector[2]);
vector[0] /= R;
vector[1] /= R;
vector[2] /= R;
}
void buildBoxShape() {
//box(60, 10, 40);
noStroke();
beginShape(QUADS);
//Z+ (to the drawing area)
fill(#00ff00);
vertex(-30, -5, 20);
vertex(30, -5, 20);
vertex(30, 5, 20);
vertex(-30, 5, 20);
//Z-
fill(#0000ff);
vertex(-30, -5, -20);
vertex(30, -5, -20);
vertex(30, 5, -20);
vertex(-30, 5, -20);
//X-
fill(#ff0000);
vertex(-30, -5, -20);
vertex(-30, -5, 20);
vertex(-30, 5, 20);
vertex(-30, 5, -20);
//X+
fill(#ffff00);
vertex(30, -5, -20);
vertex(30, -5, 20);
vertex(30, 5, 20);
vertex(30, 5, -20);
//Y-
fill(#ff00ff);
vertex(-30, -5, -20);
vertex(30, -5, -20);
vertex(30, -5, 20);
vertex(-30, -5, 20);
//Y+
fill(#00ffff);
vertex(-30, 5, -20);
vertex(30, 5, -20);
vertex(30, 5, 20);
vertex(-30, 5, 20);
endShape();
}
void drawCube(int n, float vec[]) {
pushMatrix();
translate(n, 450, 0);
scale(3,3,3);
rotateX(HALF_PI * vec[0]);
rotateZ(HALF_PI * -vec[1]);
buildBoxShape();
popMatrix();
}
void draw() {
readSensors();
normalize3DVec(Acc);
normalize3DVec(Gyr);
normalize3DVec(Cmp);
normalize3DVec(Klm);
normalize3DVec(Mdw);
background(#000000);
fill(#ffffff);
textFont(font, 24);
text("Sensor Fusion Test using Spresense with BMI160", 180, 100);
textFont(font, 18);
text("Accelerometer :\n" + Acc[0] + "\n" + Acc[1], 50, 180);
drawCube(150, Acc);
text("Gyroscope :\n" + Gyr[0] + "\n" + Gyr[1], 250, 180);
drawCube(350, Gyr);
text("Comp. Filter :\n" + Cmp[0] + "\n" + Cmp[1], 450, 180);
drawCube(550, Cmp);
text("Kalman Filter :\n" + Klm[0] + "\n" + Klm[1], 650, 180);
drawCube(750, Klm);
text("Madgwick Filter :\n" + Mdw[0] + "\n" + Mdw[1], 850, 180);
drawCube(950, Mdw);
}
百聞は一見にしかず、ぜひ動画で見てみてください。どのフィルタがどのような性質を持っているかグラフィックで見てみるとひと目で分かります! 😀
(^^)/~

- 出版社/メーカー: 森北出版
- 発売日: 2017/03/03
- メディア: 単行本(ソフトカバー)

SONY SPRESENSE メインボード CXD5602PWBMAIN1
- 出版社/メーカー: スプレッセンス(Spresense)
- メディア: Tools & Hardware

SODIAL 6軸レートジャイロ BMI160 6自由度重力加速度センサー モジュールIIC SPIブロード
- 出版社/メーカー: SODIAL
- メディア: その他
【SPRESENSE】BMI160用のセンサーフュージョン・フィルターを検討する(1) [ロボット]
今回、試してみるフィルターは次の3つです。
・ Complementary Filter
・ Kalman Filter
・ Madgwick Filter
それぞれに対して簡単に紹介します。
■ Complementary Filter
Complementary Filter は、ジャイロデータの積分値と加速度データで割り出したロールとピッチをある比(0.93:0.02)で足したものを出力とするものです。非常に単純で、応答速度が早いですが、ノイズも大きいのが欠点です。英語ですがこちらの記事が参考になります。
Reading a IMU Without Kalman: The Complementary Filter
■ Kalman Filter
Kalman Filter は、もう説明が必要のないくらい有名なフィルターです。Arduino用のライブラリがありますので、こちらをダウンロードして使いました。
Kalman Filter Library
カルマンフィルターの詳細を知りたい方はこちらの記事が参考になります。
カルマンフィルタの考え方
■ Madgwick Filter
Madgwick Filter は、少しマイナーですがカルマンフィルター同様に自己位置推定によく使われるフィルターです。カルマンフィルターより応答が早いのが特長ですが、収束が遅いと言われています。Madgwick Filter も Arduino ライブラリがあるのでこちらを使用しました。
Madgwick
Madgwick フィルターの詳細を知りたい方はこちらの記事が参考になると思います。
Madgwick Filterを読んでみた
■ Madgwick Filter を改造する
使用した Madgwick Filter はデータのサンプリング周波数が固定値でしか与えられません。時間保証ができるのであればよいのですが、SPRESENSEはOS上で走っているので若干のジッターは避けられません。ですので、サンプリング間隔を計算の度に与えられる関数を追加しました。
// MadgwickAHRS.h に追加 void updateIMU2(float gx, float gy, float gz, float ax, float ay, float az, double dt);
// MadgwickAHRS.cpp に追加
void Madgwick::updateIMU2(
float gx, float gy, float gz, float ax, float ay, float az, double dt) {
invSampleFreq = 1.0f / (1.0f / dt);
updateIMU(gx, gy, gz, ax, ay, az);
}
■ SPRESENSE用スケッチを書く
それぞれのフィルターがどのように振る舞うか調べるために次のスケッチを書いてみました。
#include <Wire.h>
#include <math.h>
#include <BMI160Gen.h>
#include <Kalman.h>
#include <MadgwickAHRS.h>
#define PRINT_ROLL
// #define PRINT_PITCH
#define BAUDRATE 115200
#define SENSE_RATE 100
#define GYRO_RANGE 250
#define ACCL_RANGE 2
#define deg_to_rad(a) (a/180*M_PI)
#define rad_to_deg(a) (a/M_PI*180)
Kalman kalmanRoll;
Kalman kalmanPitch;
Madgwick madgwick;
float convertRawGyro(int gRaw) {
// ex) if the range is +/-500 deg/s: +/-32768/500 = +/-65.536 LSB/(deg/s)
float lsb_omega = float(0x7FFF) / GYRO_RANGE;
return gRaw / lsb_omega; // deg/sec
}
float convertRawAccel(int aRaw) {
// ex) if the range is +/-2g ; +/-32768/2 = +/-16384 LSB/g
float lsb_g = float(0x7FFF) / ACCL_RANGE;
return aRaw / lsb_g;
}
static float gyro_roll = 0, gyro_pitch = 0, gyro_yaw = 0;
static float comp_roll = 0, comp_pitch = 0;
static unsigned long last_mills = 0;
void print_roll_pitch()
{
// read raw accl measurements from device
int rawXAcc, rawYAcc, rawZAcc; // x, y, z
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
float accX = convertRawAccel(rawXAcc);
float accY = convertRawAccel(rawYAcc);
float accZ = convertRawAccel(rawZAcc);
float rad_a_roll = atan2(accY, accZ);
float rad_a_pitch = atan2(-accX, sqrt(accY*accY + accZ*accZ));
float accl_roll = rad_to_deg(rad_a_roll);
float accl_pitch = rad_to_deg(rad_a_pitch);
// read raw gyro measurements from device
int rawRoll, rawPitch, rawYaw; // roll, pitch, yaw
BMI160.readGyro(rawRoll, rawPitch, rawYaw);
float omega_roll = convertRawGyro(rawRoll);
float omega_pitch = convertRawGyro(rawPitch);
float omega_yaw = convertRawGyro(rawYaw);
unsigned long cur_mills = micros();
unsigned long duration = cur_mills - last_mills;
last_mills = cur_mills;
double dt = duration / 1000000.0; // us->s
if (dt > 0.1) return;
// Gyro data
gyro_roll += omega_roll * dt; // (ms->s) omega x time = degree
gyro_pitch += omega_pitch * dt;
gyro_yaw += omega_yaw * dt;
// Complementary filter data
comp_roll = 0.93 * (comp_roll + omega_roll * dt) + 0.07 * accl_roll;
comp_pitch = 0.93 * (comp_pitch + omega_pitch * dt) + 0.07 * accl_pitch;
// Kalman filter data
float kalm_roll = kalmanRoll.getAngle(accl_roll, omega_roll, dt);
float kalm_pitch = kalmanPitch.getAngle(accl_pitch, omega_pitch, dt);
// Madgwick filter data
madgwick.updateIMU2(omega_roll, omega_pitch, omega_yaw, accX, accY, accZ, dt);
float madw_roll = madgwick.getRoll();
float madw_pitch = madgwick.getPitch();
float madw_yaw = madgwick.getYaw();
#ifdef PRINT_ROLL
Serial.print(cur_mills); // sampling time
Serial.print(",");
Serial.print(accl_roll); // roll data calculated by the accelerometer
Serial.print(",");
Serial.print(gyro_roll); // roll data calculated by the gyroscope
Serial.print(",");
Serial.print(comp_roll); // roll data calculated by the complementary filter
Serial.print(",");
Serial.print(kalm_roll); // roll data calculated by the kalman filter
Serial.print(",");
Serial.print(madw_roll); // roll data calculated by the madgwick filter
#endif
#ifdef PRINT_PITCH
Serial.print(cur_mills); // sampling time
Serial.print(",");
Serial.print(accl_pitch); // pitch data calculated by the acclerometer
Serial.print(",");
Serial.print(gyro_pitch); // pitch data calculated by the gyroscope
Serial.print(",");
Serial.print(comp_pitch); // pitch data calculated by the complemtary filter
Serial.print(",");
Serial.print(kalm_pitch); // pitch data calculated by the kalman fitler
Serial.print(",");
Serial.print(madw_pitch); // pitch data calculated by the madgwick filter
#endif
Serial.println();
}
void setup() {
Serial.begin(115200);
BMI160.begin(BMI160GenClass::I2C_MODE);
madgwick.begin(SENSE_RATE);
BMI160.setGyroRate(SENSE_RATE);
BMI160.setAccelerometerRate(SENSE_RATE);
BMI160.setGyroRange(GYRO_RANGE);
BMI160.setAccelerometerRange(ACCL_RANGE);
BMI160.autoCalibrateGyroOffset();
BMI160.autoCalibrateAccelerometerOffset(X_AXIS, 0);
BMI160.autoCalibrateAccelerometerOffset(Y_AXIS, 0);
BMI160.autoCalibrateAccelerometerOffset(Z_AXIS, 1);
delay(100);
/* Set kalman and gyro starting angle */
int rawXAcc, rawYAcc, rawZAcc;
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
float accX = convertRawAccel(rawXAcc);
float accY = convertRawAccel(rawYAcc);
float accZ = convertRawAccel(rawZAcc);
float roll = rad_to_deg(atan(accY / accZ));
float pitch = rad_to_deg(atan(-accX / sqrt(accY * accY + accZ * accZ)));
// Set starting angle
kalmanRoll.setAngle(roll);
kalmanPitch.setAngle(pitch);
gyro_roll = comp_roll = roll;
gyro_pitch = gyro_pitch = pitch;
}
void loop() {
print_roll_pitch();
}
■ 出力データを確認する
ロール方向、ピッチ方向にそれぞれ筐体を振ってみてデータを収集しました。
それぞれのデータはこちらです。
.png)
-141f9.png)
どのフィルタもジャイロのドリフトはキャンセルしてくれているのは分かりますが、グラフだけではどれが良いのかピンと来ませんね。もう少しうまく評価できる方法を考えてみたいと思います。🤨
(-ω-;)
SONY SPRESENSE メインボード CXD5602PWBMAIN1
- 出版社/メーカー: スプレッセンス(Spresense)
- メディア: Tools & Hardware
SODIAL 6軸レートジャイロ BMI160 6自由度重力加速度センサー モジュールIIC SPIブロード
- 出版社/メーカー: SODIAL
- メディア: その他
")
- 作者: クライソン・トロンナムチャイ
- 出版社/メーカー: 日刊工業新聞社
- 発売日: 2018/03/29
- メディア: 単行本
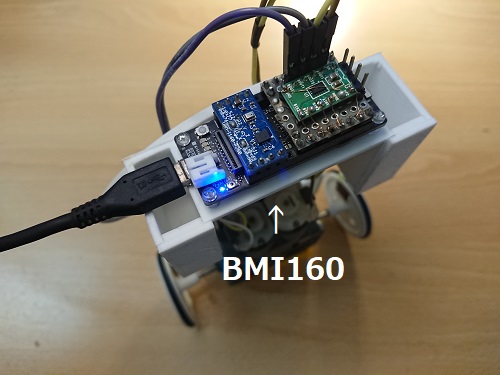
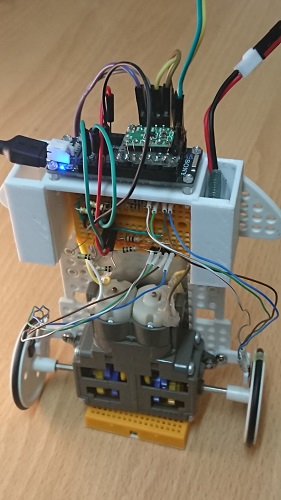
SPRESENSE と BMI160アドオンボードで傾きを測ってみた!(1) [ロボット]
SPRESENSE用3軸加速度・3軸ジャイロ・気圧・温度センサ アドオンボード BMP280 BMI160搭載
https://www.switch-science.com/catalog/5258/
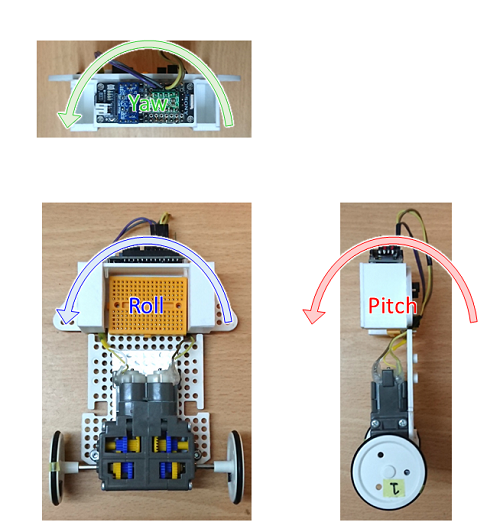
このボードはジャイロと加速度センサーが搭載されています。今回はそれぞれのセンサーで出力される値を比較してみたいと思います。加速度センサーとジャイロセンサーの座標軸は次のようになっています。
加速度センサーの座標軸
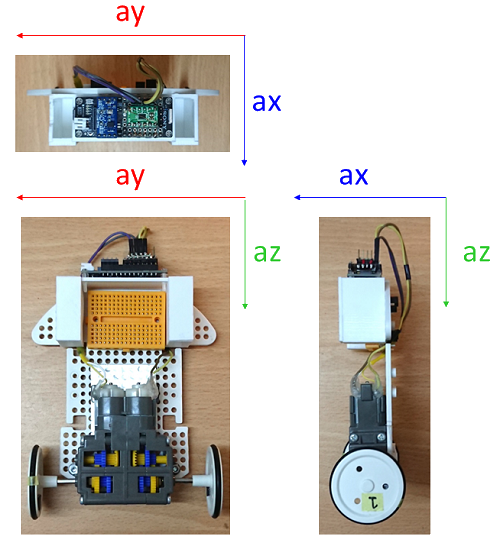
ジャイロセンサーの座標軸
ジャイロセンサーからは角加速度が出力されますので、角度は時間積分で求まります。
\[
\theta = \int_{0}^{t} \omega(t) \, dt
\]
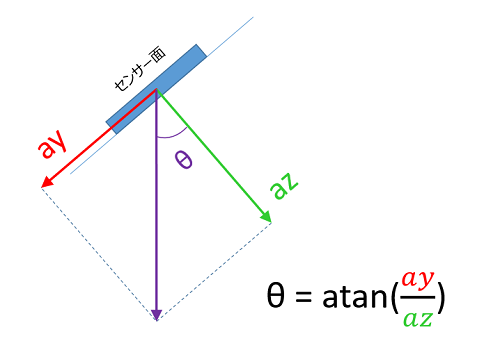
加速度センサーで角度を出すには、重力を使います。重力加速度は常に下向きになりますので、角度は例えばZ成分とY成分のatan で求まります。プログラミング時は角度とラジアンの単位の違いに注意してください。
あともう一点、注意しないといけないのは、置いた場所が水平とは限らないことです。何もしないと各軸への重力影響が取り除けず正しい角度が算出できません。開始時に各軸の重力加速度を計測をしておき、制御時はその影響を取り除く必要があります。(プログラム中では"Calibration"と呼んでいます)
これらのことを踏まえて、次のようなスケッチを書いてみました。
#include <Wire.h>
#include <math.h>
#include <BMI160Gen.>
#define BAUDRATE 115200
#define SENSE_RATE 200
#define GYRO_RANGE 250
#define ACCL_RANGE 2
#define COUNT_FOR_CALIB 1024
#define deg_to_rad(a) (a/180*M_PI)
#define rad_to_deg(a) (a/M_PI*180)
#define PRINT_ACCL
#define PRINT_GYRO
// #define PRINT_YAW
uint16_t adjust_usec;
static float calib_accel_x = 0, calib_accel_y = 0, calib_accel_z = 0;
float convertRawGyro(int gRaw)
{
// ex) if the range is +/-500 deg/s: +/-32768/500 = +/-65.536 LSB/(deg/s)
float lsb_omega = float(0x7FFF) / GYRO_RANGE;
return gRaw / lsb_omega; // deg/sec
}
float convertRawAccel(int aRaw)
{
// ex) if the range is +/-2g ; +/-32768/2 = +/-16384 LSB/g
float lsb_g = float(0x7FFF) / ACCL_RANGE;
return aRaw / lsb_g;
}
void print_pitch_roll()
{
static uint16_t n = 0;
static float g_angle_roll = 0, g_angle_pitch = 0, g_angle_yaw = 0;
static float a_angle_roll = 0, a_angle_pitch = 0, a_angle_yaw = 0;
static unsigned long last_mills = 0;
// read raw gyro measurements from device
int rawRoll, rawPitch, rawYaw; // roll, pitch, yaw
BMI160.readGyro(rawRoll, rawPitch, rawYaw);
// read raw accl measurements from device
int rawXAcc, rawYAcc, rawZAcc; // x, y, z
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
unsigned long cur_mills = millis();
unsigned long duration = cur_mills - last_mills;
last_mills = cur_mills;
float fduration = duration / 1000.0; // ms->s
// convert the raw gyro data to degrees/second
float omega_roll = convertRawGyro(rawRoll);
float omega_pitch = convertRawGyro(rawPitch);
float omega_yaw = convertRawGyro(rawYaw);
g_angle_roll += omega_roll * fduration; // (ms->s) omega x time = degree
g_angle_pitch += omega_pitch * fduration;
g_angle_yaw += omega_yaw * fduration; // for the reference
// convert the raw acclerometer data to m/s^2
float cur_a_x = convertRawAccel(rawXAcc) - calib_accel_x;
float cur_a_y = convertRawAccel(rawYAcc) - calib_accel_y;
float cur_a_z = convertRawAccel(rawZAcc) - calib_accel_z;
cur_a_x = deg_to_rad(cur_a_x);
cur_a_y = deg_to_rad(cur_a_y);
cur_a_z = deg_to_rad(cur_a_z);
a_angle_roll = atan(cur_a_y / cur_a_z);
a_angle_pitch = atan(-cur_a_x / cur_a_z);
a_angle_roll = rad_to_deg(a_angle_roll);
a_angle_pitch = rad_to_deg(a_angle_pitch);
#ifdef PRINT_GYRO
// Serial.print("Duration:");
// Serial.print(duration);
// Serial.print(",");
Serial.print("GYRO_roll:");
Serial.print(g_angle_roll);
Serial.print(",");
Serial.print("GYRO_pitch:");
Serial.print(g_angle_pitch);
Serial.print(",");
#ifdef PRINT_YAW
Serial.print("GYRO_yaw:");
Serial.print(g_angle_yaw);
Serial.print(",");
#endif
#endif
// display tab-separated accel x/y/z values
#ifdef PRINT_ACCL
Serial.print("ACC_roll:");
Serial.print(a_angle_roll);
Serial.print(",");
Serial.print("ACC_pitch:");
Serial.print(a_angle_pitch);
#endif
Serial.println();
usleep(adjust_usec); // 2msec is the process time for displaying the values.
}
void setup() {
Serial.begin(BAUDRATE);
BMI160.begin(BMI160GenClass::I2C_MODE);
BMI160.setGyroRate(SENSE_RATE);
BMI160.setAccelerometerRate(SENSE_RATE);
BMI160.setGyroRange(GYRO_RANGE);
BMI160.setAccelerometerRange(ACCL_RANGE);
BMI160.autoCalibrateGyroOffset();
BMI160.autoCalibrateAccelerometerOffset(X_AXIS, 0);
BMI160.autoCalibrateAccelerometerOffset(Y_AXIS, 0);
BMI160.autoCalibrateAccelerometerOffset(Z_AXIS, 1);
// Serial.println("Calibrating...");
unsigned long sampling_rate = 1000 / SENSE_RATE;
// Calcurate offset
for (int i = 0; i < COUNT_FOR_CALIB; ++i) {
int xAcc, yAcc, zAcc;
BMI160.readAccelerometer(xAcc, yAcc, zAcc);
calib_accel_x += convertRawAccel(xAcc);
calib_accel_y += convertRawAccel(yAcc);
calib_accel_z += convertRawAccel(zAcc)-1.0;
}
// mean value
calib_accel_x /= COUNT_FOR_CALIB;
calib_accel_y /= COUNT_FOR_CALIB;
calib_accel_z /= COUNT_FOR_CALIB;
calib_accel_z *= 1000; // The offset supports +/-495.3(mg)
Serial.println("calib_a_x:" + String(calib_accel_x, 3));
Serial.println("calib_a_y:" + String(calib_accel_y, 3));
Serial.println("calib_a_z:" + String(calib_accel_z, 3));
// SENSE_RATE is Hz and 2 millsec is the process time for this sketch
adjust_usec = (1000/SENSE_RATE - 2) * 1000;
digitalWrite(LED0, HIGH);
}
void loop() {
print_pitch_roll();
}
このスケッチで計測した結果がこちらです。
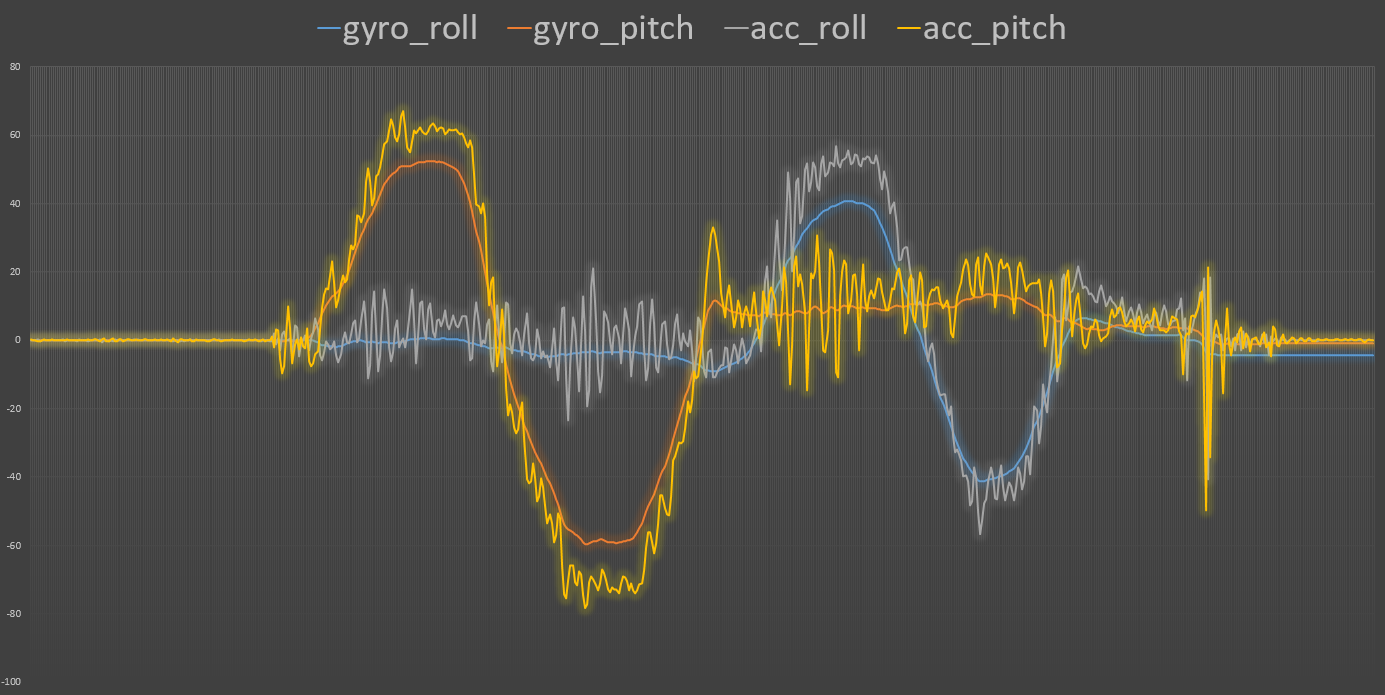
ジャイロの変化は非常に滑らかなのに対し、加速度センサーはノイズが多いです。一方、ジャイロは"gyro_roll"の最後にオフセットがかかってしまっていますが、加速度センサーはその影響はなさそうです。(拡大して見ると"gyro_pitch"もオフセットを持ってしまっているようです)
どちらも一長一短ですね。この2つのセンサーの特長をうまく利用するために、次はフィルター処理を試してみたいと思います。😀
(^^)/~
SONY SPRESENSE メインボード CXD5602PWBMAIN1
- 出版社/メーカー: スプレッセンス(Spresense)
- メディア: Tools & Hardware

ROHM センサAdd-onボード SPRESENSE-SENSOR-EVK-701
- 出版社/メーカー: ローム(ROHM)
- メディア: Tools & Hardware
SODIAL 6軸レートジャイロ BMI160 6自由度重力加速度センサー モジュールIIC SPIブロード
- 出版社/メーカー: SODIAL
- メディア: その他
SPRESENSE とホール素子でモーターの回転数を計ってみる(2) [ロボット]
まずはスケッチから。モーターを analogWrite で駆動して、ホール素子の電圧の立ち上がりを割り込みでキャッチして回転数をカウントしています。なるべく誤差が出ないように回転数の測定は10秒間と長めに行っていました。
モーターは供給電圧が低い状態では、ギアの駆動抵抗が高くて動かせないので、5msec フル電圧で動かすという小技を使っています。
#define AIN01 20
#define AIN02 21
#define AIN11 18
#define AIN12 19
#define DASH 5
#define DET_PIN_1 14
#define DET_PIN_2 15
#define MEASURE_TIME 10
static uint16_t cnt_1 = 0;
static uint16_t cnt_2 = 0;
static uint8_t level = 5;
static boolean accel = true;
static boolean finish = false;
void count_1() {
++cnt_1;
}
void count_2() {
++cnt_2;
}
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
pinMode(DET_PIN_1, INPUT_PULLDOWN);
pinMode(DET_PIN_2, INPUT_PULLDOWN);
#ifdef INA219
ina219.begin();
#endif
attachInterrupt(digitalPinToInterrupt(DET_PIN_1), count_1, RISING);
attachInterrupt(digitalPinToInterrupt(DET_PIN_2), count_2, RISING);
}
void motor_drive(uint8_t n, bool cw) {
if (n > 255) n = 255;
if (n < 0) n = 0;
#ifdef DASH
if (n < 200) {
if (cw) analogWrite(AIN01, 255);
else analogWrite(AIN02, 255);
if (cw) analogWrite(AIN11, 255);
else analogWrite(AIN12, 255);
delay(DASH);
}
#endif
if (cw) {
analogWrite(AIN01, n);
analogWrite(AIN02, 0);
analogWrite(AIN11, n);
analogWrite(AIN12, 0);
} else {
analogWrite(AIN01, 0);
analogWrite(AIN02, n);
analogWrite(AIN11, 0);
analogWrite(AIN12, n);
}
}
void countingRot(int n) {
static unsigned long mtime;
interrupts();
mtime = millis();
sleep(MEASURE_TIME);
mtime = millis() - mtime;
noInterrupts();
Serial.print(String(n) + ",");
Serial.print(String(mtime) + ",");
Serial.print(String(cnt_1) + ",");
Serial.println(String(cnt_2));
cnt_1 = 0;
cnt_2 = 0;
}
void loop() {
int i = 0;
unsigned long mtime;
do {
motor_drive(i, true);
countingRot(i);
i += 5;
} while (i <= 250);
i = 255;
do {
motor_drive(i, true);
countingRot(i);
i -= 5;
} while (i >= 0);
i = 0;
do {
motor_drive(i, false);
countingRot(i);
i += 5;
} while (i <= 250);
i = 255;
do {
motor_drive(i, false);
countingRot(i);
i -= 5;
} while (i > 0);
while(1);
}
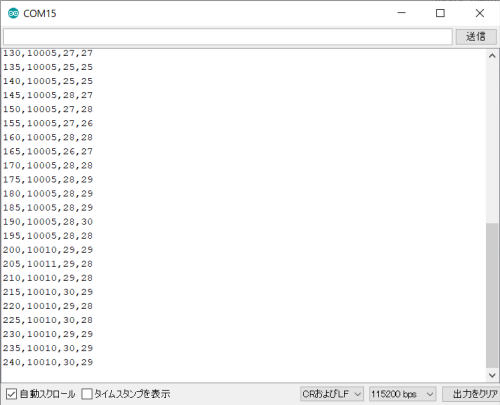
測定時のログ出力の様子です。左から、PWM出力値、測定時間(ms)、左モーター回転数、右モーター回転数です。
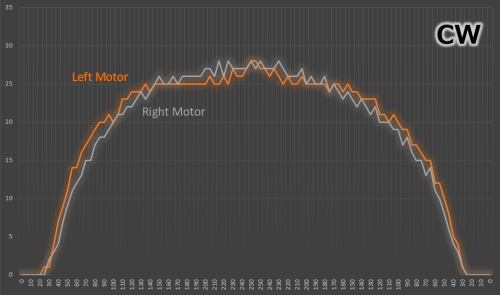
気になる実際の測定値はこちら。まず時計方向、反時計方向の測定値です。
-8c028.png)
左右のモーター間の回転数のばらつきは想定したよりもありませんでしたが、時計方向と反時計方向の違いが顕著です。これは恐らく電気系の問題ではなく、ギヤなどメカ的な問題かも知れません。いずれにしても制御のときは考慮する必要がありそうですね。
あと長時間測定をしていたので、バッテリーの供給電力の問題が出るかなと思ったのですが思いの外、違いはなさそうです。(バッテリーにもよるとは思いますが…)
次はセンサー処理について検討をしていきたいと思います。
( ・ิω・ิ)
SONY SPRESENSE メインボード CXD5602PWBMAIN1
- 出版社/メーカー: スプレッセンス(Spresense)
- メディア: Tools & Hardware
- 作者: 大西 和則
- 出版社/メーカー:
- 発売日: 2019/08/21
- メディア: Kindle版
")
最新版 モータ技術のすべてがわかる本 (史上最強カラー図解)
- 作者: 赤津 観
- 出版社/メーカー: ナツメ社
- 発売日: 2012/09/04
- メディア: 単行本
SPRESENSE とホール素子でモーターの回転数を計ってみる(1) [ロボット]
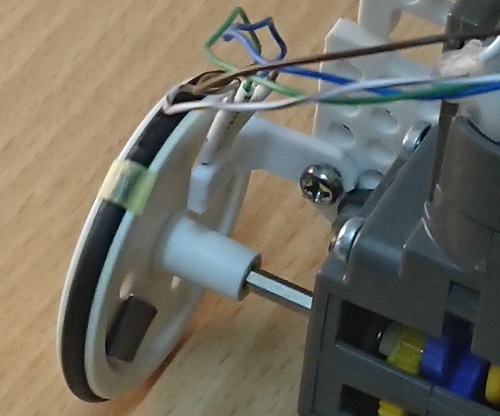
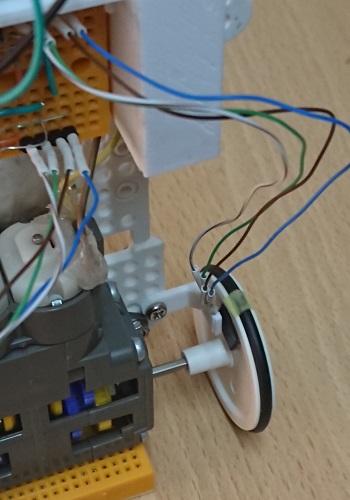
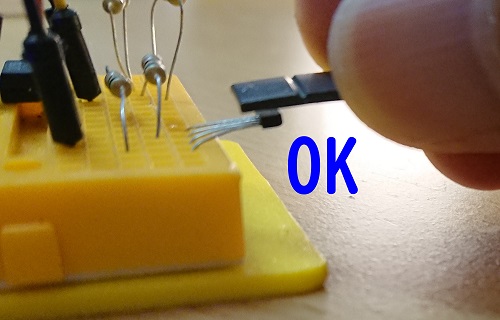
ホール素子のホルダーは3Dプリンタで作成しました。アームとパーツの二つの部品で構成されています。格安のオンボロ3Dプリンタですが、ちょっとした工作をするには便利です。

ホルダーにホール素子を両面テープで貼り付けます。
これを倒立振り子のメカに組み付けます。車輪に 1cm x 1cm のテープ磁石をつけます。あまり幅が大きいと間違ってカウントしてしまうので磁石の大きさは重要です。
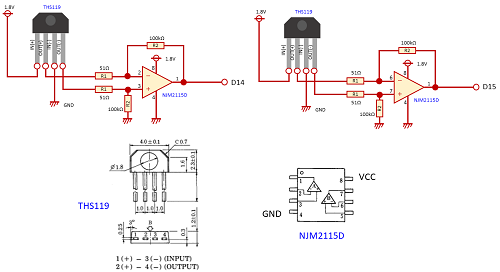
NJM2115Dは、オペアンプを2回路内蔵していますので、ホール素子のアンプ回路を次のようにくみ上げました。
一生懸命書いたのですが、分かりにくくなってしまったので回路図も示します。^^;
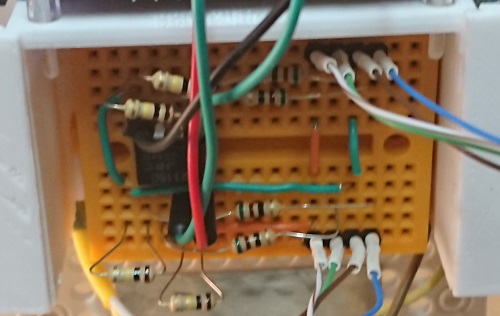
ブレッドボードに実際に組み上げたのがこちらです。図よりも見やすいかも…
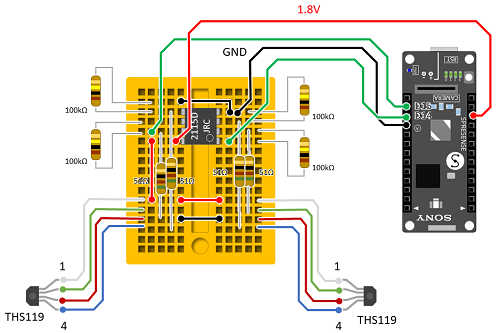
SPRESENSE側の接続は次のようになっています。
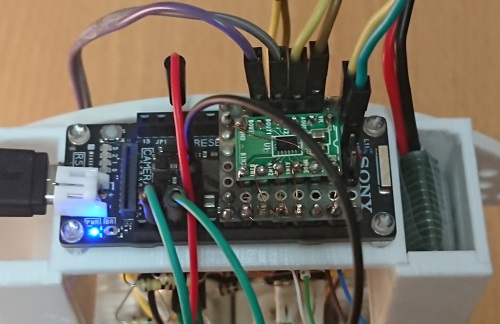
実際に動かしてみたところ、順調にカウントしてくれてました。
次は、計測用のスケッチを書いて回転数を計測をしてみたいと思います!
( ー`дー´)
SONY SPRESENSE メインボード CXD5602PWBMAIN1
- 出版社/メーカー: スプレッセンス(Spresense)
- メディア: Tools & Hardware
 10 x 3ピンユニポーラホール効果センサ磁気検出器2.5,20V")
SODIAL(R) 10 x 3ピンユニポーラホール効果センサ磁気検出器2.5,20V
- 出版社/メーカー: SODIAL
- メディア: その他
 2回路 低雑音 オペアンプ NJM5532DD (5個セット)")
JRC(新日本無線) 2回路 低雑音 オペアンプ NJM5532DD (5個セット)
- 出版社/メーカー: JRC(新日本無線)
- メディア:

Longruner 5個セット arduino用 電圧DC 5V ステッピングモーター+28BYJ-48 ULN2003ドライバテストモジュールボード 電作キット LK67
- 出版社/メーカー: Longruner
- メディア:
【備忘録】SPRESENSE でホール素子「THS119」を使う場合の注意点 [ロボット]
THS119をSPRESENSEで扱うための回路は前回紹介しましたが、SPRESENSEには、次のように接続しました。
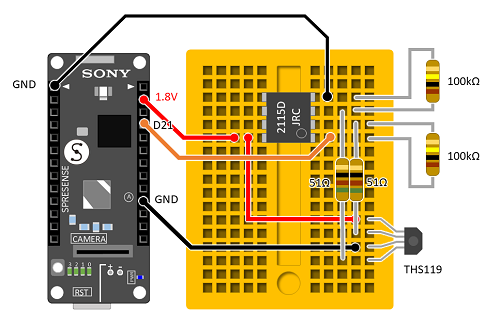
スケッチは次のような極めて簡単なものです。
#define DET_PIN 21
void setup() {
Serial.begin(115200);
pinMode(DET_PIN, INPUT_PULLDOWN);
sleep(1);
}
unsigned long n = 0;
void loop() {
int val = digitalRead(DET_PIN);
if (val == HIGH) {
Serial.println(String(n));
}
++n;
}
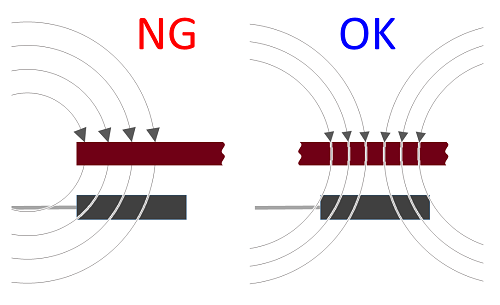
当初なるべく車輪の中心から遠いところでカウントしたいと思い(測定間隔が稼げるので)、テープ磁石の端でカウントしようと思ったのですが、まったくセンスしません。
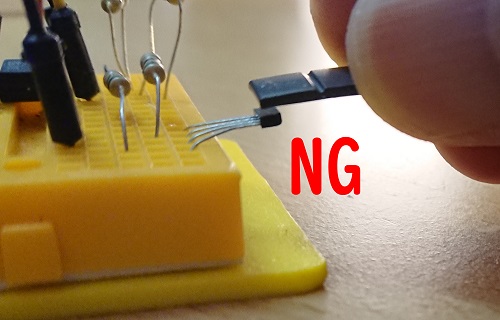
ありゃ?回路失敗したか?と思ったのですが、いろいろ試行錯誤をしたところ、テープ磁石の真ん中近くだとうまくセンスしてくれることがわかりました。
どうも、素子に対して垂直に磁束が入らないとカウントしないみたいです。
測定用のメカを3Dプリンタで試作したのですが、作り直しとなってしまいました。
トホホ (´・ω・`)
SONY SPRESENSE メインボード CXD5602PWBMAIN1
- 出版社/メーカー: スプレッセンス(Spresense)
- メディア: Tools & Hardware

uxcell ホール効果センサー磁気検出器 ホール効果センサ 10個入り ブラック 19 x 4 x 1.5mm 2.5-20V
- 出版社/メーカー: uxcell
- メディア: その他

コクヨ マグネット 強力マグネットプレート 片面・粘着剤付き 6枚 耐荷重500g マク-S381
- 出版社/メーカー: コクヨ(KOKUYO)
- メディア: オフィス用品
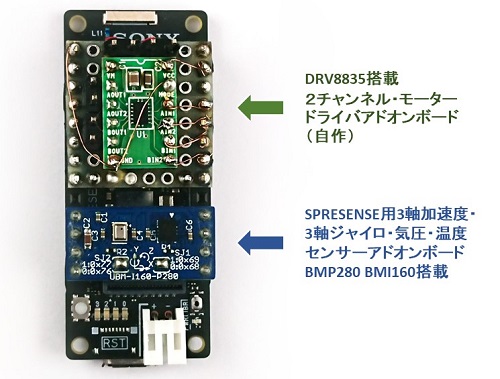
SPRESENSE用モータードライバ・アドオンボードを作ってみた(2) [ロボット]
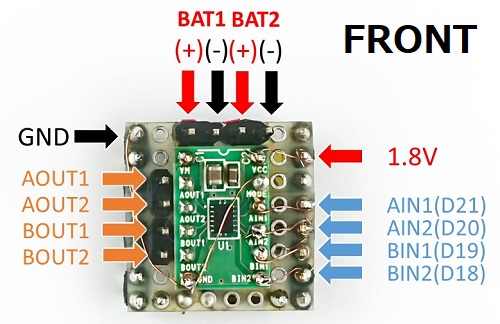
アドオンボードの仕様を再掲します。
使用したスケッチは次のような単純なものです。
#define AIN01 21
#define AIN02 20
#define AIN11 19
#define AIN12 18
#define DELAY 3000
#define DASH 5
void motor_drive(uint8_t i, bool cw) {
#ifdef DASH
if (cw) {
analogWrite(AIN01, 255);
analogWrite(AIN02, 0);
analogWrite(AIN11, 255);
analogWrite(AIN12, 0);
} else {
analogWrite(AIN01, 0);
analogWrite(AIN02, 255);
analogWrite(AIN11, 0);
analogWrite(AIN12, 255);
}
delay(DASH);
#endif
if (cw) {
analogWrite(AIN01, i);
analogWrite(AIN02, 0);
analogWrite(AIN11, i);
analogWrite(AIN12, 0);
} else {
analogWrite(AIN01, 0);
analogWrite(AIN02, i);
analogWrite(AIN11, 0);
analogWrite(AIN12, i);
}
Serial.println(i);
delay(DELAY);
}
void setup() {
Serial.begin(115200);
}
void loop() {
int i;
for (i = 0; i <= 250; i+=10) {
motor_drive(i, true);
}
for (i = 250; i >= 0; i-=10) {
motor_drive(i, true);
}
for (i = 0; i <= 250; i+=10) {
motor_drive(i, false);
}
for (i = 250; i >= 0; i-=10) {
motor_drive(i, false);
}
while(1);
}
百聞は一見にしかずということで、実際の動作は動画でどうぞ。(^-^)
SONY SPRESENSE メインボード CXD5602PWBMAIN1
- 出版社/メーカー: スプレッセンス(Spresense)
- メディア: Tools & Hardware

KKHMF 3個 2チャンネル直流モータードライブモジュール プラスとマイナスの回転 ダブルHブリッジステッピングモータミニドライブボード 「国内配送」
- 出版社/メーカー: Apple Trees E-commerce co., LT
- メディア:
ROHM センサAdd-onボード SPRESENSE-SENSOR-EVK-701
- 出版社/メーカー: ローム(ROHM)
- メディア: Tools & Hardware
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me


