ROS2/Humble で Turtlebot3 Navigation がうまく動かなかった話 [ロボット]
すっかりブログをサボっていましたが、そろそろ再開しようと思います。忙しくなると、ついついブログの存在を忘れてしまうんですよねぇ。
最近は、ROS2/micro-ROS をさわりはじめています。ROSとは「Robot OS」の略で、ホストPCとロボット間の通信や、ロボットから送られるセンシングデータを使ってホストPC側で、SLAM や Navigation などを行えるライブラリならびにツール群です。
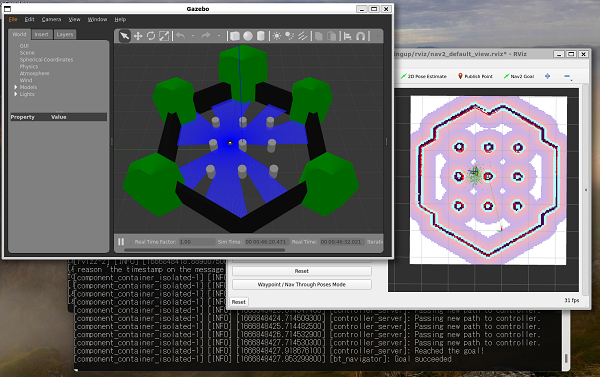
こちらの記事を参照して、ROS2/humble を使って Turtlebot3 のナビゲーションのシミュレーションを試そうと思ったのですが、うまく動きません。具体的には、SLAMで作成した地図が rviz2 で表示されないのです。
#上の画像はうまくいったあとの画像です。
エラーメッセージを手がかりに、いろいろと調べてようやくたどり着いた解決方法がこちら。
AMCL failing when starting Navigation Simulation
https://github.com/ROBOTIS-GIT/turtlebot3/issues/884
具体的には、"/opt/ros/humble/share/turtlebot3_navigation2/param/burger.yaml" の中の "robot_model_type" を変更すれば回避できます。
Github の Issues で解決策が見つかるあたり、まだまだ発展途上のプラットフォームですね。ただ可能性を感じるテクノロジーですので、これから追いかけていきたいと思います。
(^^)/~
")
")
最近は、ROS2/micro-ROS をさわりはじめています。ROSとは「Robot OS」の略で、ホストPCとロボット間の通信や、ロボットから送られるセンシングデータを使ってホストPC側で、SLAM や Navigation などを行えるライブラリならびにツール群です。
こちらの記事を参照して、ROS2/humble を使って Turtlebot3 のナビゲーションのシミュレーションを試そうと思ったのですが、うまく動きません。具体的には、SLAMで作成した地図が rviz2 で表示されないのです。
#上の画像はうまくいったあとの画像です。
エラーメッセージを手がかりに、いろいろと調べてようやくたどり着いた解決方法がこちら。
AMCL failing when starting Navigation Simulation
https://github.com/ROBOTIS-GIT/turtlebot3/issues/884
具体的には、"/opt/ros/humble/share/turtlebot3_navigation2/param/burger.yaml" の中の "robot_model_type" を変更すれば回避できます。
|
変更前:robot_model_type:"differential" 変更後:robot_model_type: "nav2_amcl::DifferentialMotionModel" |
Github の Issues で解決策が見つかるあたり、まだまだ発展途上のプラットフォームですね。ただ可能性を感じるテクノロジーですので、これから追いかけていきたいと思います。
(^^)/~
ROS2とPythonで作って学ぶAIロボット入門 (KS理工学専門書)
- 出版社/メーカー: 講談社
- 発売日: 2022/09/01
- メディア: 単行本(ソフトカバー)
- 作者: 岡田 浩之
- 出版社/メーカー: 科学情報出版
- 発売日: 2022/10/07
- メディア: Kindle版
2022-10-27 20:00
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me


