ドローンのシステム基礎を学ぶ(6) [ロボット]
ドローンの実際の制御システム系について、これから学習していきたいと思います。ドローンが推力(THRUST)を得るにはモーターを動かさなければなりません。モーターを制御するのはマイクロプロセッサーの仕事です。
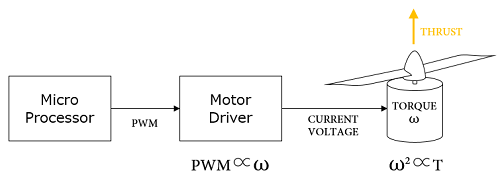
マイクロプロセッサーは、モータードライバーにPWM(パルス幅変調信号)を送ります。モータードライバはモーターに対して電力を供給し、モーターはトルクを発生させ、プロペラを回し推力(THRUST)を得ます。
一般的に PWM とトルク(ω)は比例関係にあり、トルク(ω)の二乗と推力(TRUST)が比例関係にあるといわれます。最終的にはPWMと推力(TRUST)の関係が重要になってきます。
実際の測定例がありました。PWMと推力(THRUST)の関係は二次関数で近似されています。
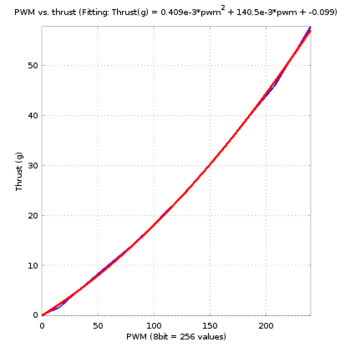
https://www.bitcraze.io/2015/02/measuring-propeller-rpm-part-3/
ドローンの場合は、4つのモーターを一つのマイクロプロセッサーで制御します。マイクロプロセッサーはそれぞれのモーターに対し同じPWMを与えれば、同じ推力が得られるのが理想的です。
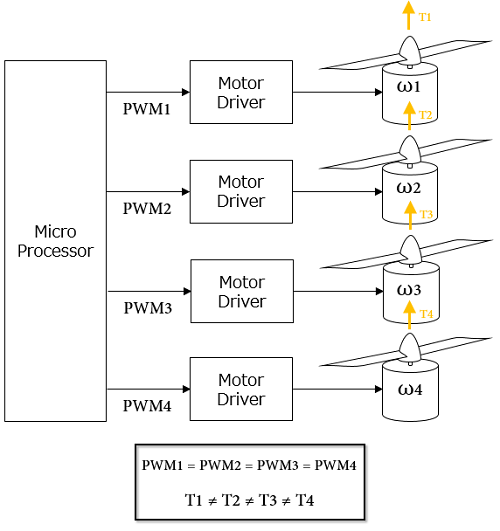
しかし、現実にはプロペラの形状のばらつき、モーターの特性のばらつきにより同じ推力を得ることはできません。しかも、温度や湿度、経年によってそのばらつきは変化していきます。
すなわち、ドローンのシステム基礎を学ぶ(4)で導き出した魔法陣は現実的にはそのままでは使えないということになります。
さて困りましたー。次回はいよいよ制御工学の領域に足を踏み入れていきます!
(^_^)/~

")

マイクロプロセッサーは、モータードライバーにPWM(パルス幅変調信号)を送ります。モータードライバはモーターに対して電力を供給し、モーターはトルクを発生させ、プロペラを回し推力(THRUST)を得ます。
一般的に PWM とトルク(ω)は比例関係にあり、トルク(ω)の二乗と推力(TRUST)が比例関係にあるといわれます。最終的にはPWMと推力(TRUST)の関係が重要になってきます。
実際の測定例がありました。PWMと推力(THRUST)の関係は二次関数で近似されています。
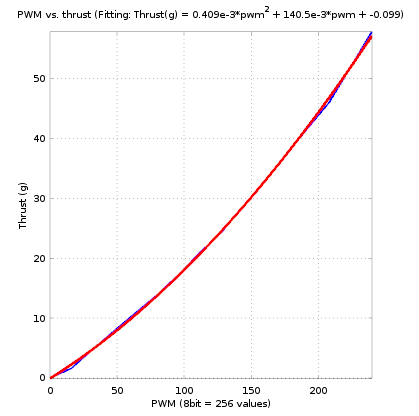
https://www.bitcraze.io/2015/02/measuring-propeller-rpm-part-3/
ドローンの場合は、4つのモーターを一つのマイクロプロセッサーで制御します。マイクロプロセッサーはそれぞれのモーターに対し同じPWMを与えれば、同じ推力が得られるのが理想的です。
しかし、現実にはプロペラの形状のばらつき、モーターの特性のばらつきにより同じ推力を得ることはできません。しかも、温度や湿度、経年によってそのばらつきは変化していきます。
すなわち、ドローンのシステム基礎を学ぶ(4)で導き出した魔法陣は現実的にはそのままでは使えないということになります。
さて困りましたー。次回はいよいよ制御工学の領域に足を踏み入れていきます!
(^_^)/~
Building Your Own Drones: A Beginners' Guide to Drones, UAVs, and ROVs
- 作者: John Baichtal
- 出版社/メーカー: Que Publishing
- 発売日: 2015/09/14
- メディア: ペーパーバック
Hobbypower QAV250クワッドローターキット Emax MT2204 BL モーター&Simonk 12A ESC& CC3D フライトコントローラー&5045プロペラ (ガラス繊維製)
- 出版社/メーカー: Hobbypower
- メディア: おもちゃ&ホビー
- 出版社/メーカー: McGraw-Hill Education TAB
- 発売日: 2016/12/02
- メディア: Kindle版
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me



コメント 0