ドローンのシステム基礎を学ぶ(7) [ロボット]
ドローンを精度よく制御するには、ドローンがどのような姿勢(Attitude)となっているか検出する必要があります。姿勢を検出するために、ジャイロセンサーや加速度センサーを使います。
基本的なドローンのシステムは、マイクロプロセッサーに、モータードライバー、プロポのレシーバー、そしてジャイロセンサー、加速度センサーがつきます。
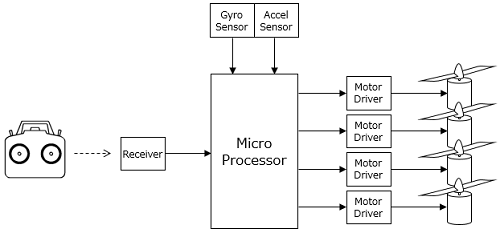
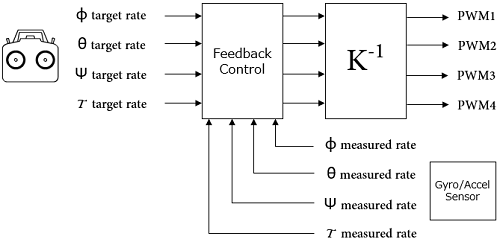
マイクロプロセッサーは、ターゲットの{Φ、θ、ψ、T}をプロポから受信する一方、センサーから{Φ、θ、ψ、T}を取得することでドローンの状態を把握し、それらの結果からモーターへの指示に変換をします。
ドローンの推力は、部品のばらつきや環境、経年によって、与えたPWM値と推力Tの関係が一定ではないことを前回述べました。
例えば、プロポから秒速4cmの上昇が指示され、モーターをそのように制御したとしても、実際は秒速3cmの可能性があります。
そのため、センサーで現在の状態を把握し、必要であればモーターへの指示を上げ下げしながらターゲットの値に近づけていきます。
次は、そのようなフィードバック制御理論について学習したいと思います!
(^_^)/~

")
")
基本的なドローンのシステムは、マイクロプロセッサーに、モータードライバー、プロポのレシーバー、そしてジャイロセンサー、加速度センサーがつきます。
マイクロプロセッサーは、ターゲットの{Φ、θ、ψ、T}をプロポから受信する一方、センサーから{Φ、θ、ψ、T}を取得することでドローンの状態を把握し、それらの結果からモーターへの指示に変換をします。
ドローンの推力は、部品のばらつきや環境、経年によって、与えたPWM値と推力Tの関係が一定ではないことを前回述べました。
例えば、プロポから秒速4cmの上昇が指示され、モーターをそのように制御したとしても、実際は秒速3cmの可能性があります。
そのため、センサーで現在の状態を把握し、必要であればモーターへの指示を上げ下げしながらターゲットの値に近づけていきます。
次は、そのようなフィードバック制御理論について学習したいと思います!
(^_^)/~
Building Your Own Drones: A Beginners' Guide to Drones, UAVs, and ROVs
- 作者: John Baichtal
- 出版社/メーカー: Que Publishing
- 発売日: 2015/09/14
- メディア: ペーパーバック
Hobbypower QAV250クワッドローターキット Emax MT2204 BL モーター&Simonk 12A ESC& CC3D フライトコントローラー&5045プロペラ (ガラス繊維製)
- 出版社/メーカー: Hobbypower
- メディア: おもちゃ&ホビー
- 作者:
- 出版社/メーカー: Maker Media, Inc
- 発売日: 2016/05/05
- メディア: ペーパーバック
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me



コメント 0