ドローンのシステム基礎を学ぶ(2) [ロボット]
今回はドローンの座標系についての学習です。ドローンには二つの座標系があります。地球を基準とした慣性系座標 (Inertial Frame: XE, YE, ZE) と、機体を基準とした機体系座標 (Body Frame: XB, YB, ZB) です。
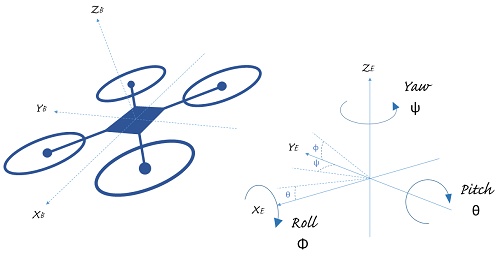
さらに、回転系を表現する Roll、Pitch、Yaw も重要な要素です。
Roll Φ: X 軸を軸に回転させた角度(Y-Z平面の回転角∠Φ)
Pitch θ: Y 軸を軸に回転させた角度(X-Z平面の回転角∠θ)
Yaw ψ: Z 軸を軸に回転させた角度(X-Y平面の回転角∠ψ)
ドローンのリモコンとなるプロポやスマホからは、これらの回転角度が指令として飛んできます。次はドローンの動作力学について学習したいと思います。
(^_^)/~


![HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]](https://images-fe.ssl-images-amazon.com/images/I/41qVIQ7kEaL._SL160_.jpg "HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]")
さらに、回転系を表現する Roll、Pitch、Yaw も重要な要素です。
Roll Φ: X 軸を軸に回転させた角度(Y-Z平面の回転角∠Φ)
Pitch θ: Y 軸を軸に回転させた角度(X-Z平面の回転角∠θ)
Yaw ψ: Z 軸を軸に回転させた角度(X-Y平面の回転角∠ψ)
ドローンのリモコンとなるプロポやスマホからは、これらの回転角度が指令として飛んできます。次はドローンの動作力学について学習したいと思います。
(^_^)/~
Building Your Own Drones: A Beginners' Guide to Drones, UAVs, and ROVs
- 作者: John Baichtal
- 出版社/メーカー: Que Publishing
- 発売日: 2015/09/14
- メディア: ペーパーバック
DIY Drones for the Evil Genius: Design, Build, and Customize Your Own Drones
- 作者: Ian Cinnamon
- 出版社/メーカー: McGraw-Hill Education TAB
- 発売日: 2016/12/02
- メディア: ペーパーバック
HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]
- 出版社/メーカー: HPHELI
- メディア:
2016-11-01 23:59
nice!(28)
コメント(0)
トラックバック(0)
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me



コメント 0