ドローンのシステム基礎を学ぶ(3) [ロボット]
今回はドローンの動作力学についての学習です。ドローンの動作を分解すると、上下動作、回転動作、上下左右動作の3つに分解できます。
まずは上下動作です。上下動作の場合は簡単に理解できます。ドローンの4つのモーターの出力を同時に上げ下げするだけで解決です。
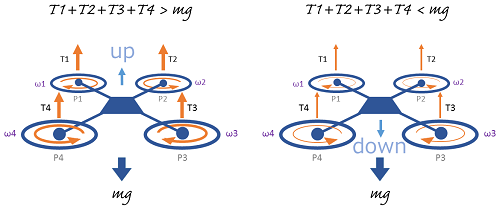
次に回転動作。回転動作はモーターの回転力を使います。同じ方向のモーターの出力を上げ、反対方向のモーターの出力を下げることで回転力が生まれます。
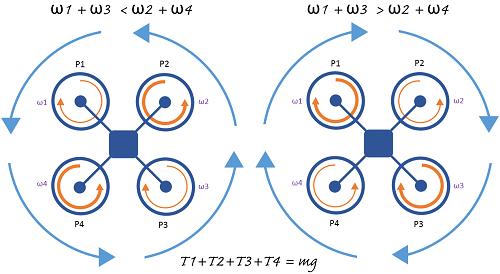
ただ、このとき推力の合計(T1+T2+T3+T4)が機体の重さを一致していないと、回転動作中に機体が上下にぶれることになるので注意が必要です。
最後は上下左右の動作です。上下左右にスライドして動くにはドローンの場合、機体を傾けなければなりません。今回は左に動く場合を考えてみます。傾ける角度はΦとします。
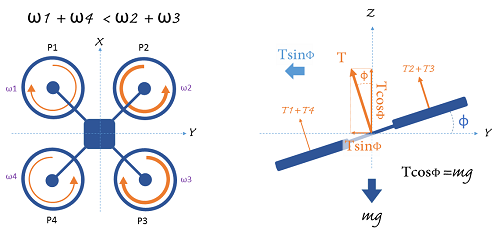
この場合の制御は少し難しいですね。傾けた分だけ横向きの推力(TsinΦ)が生まれますが、上向きの推力(TcosΦ)は、機体の重さと釣り合っている必要があります。なので傾ける前よりも 推力をアップさせなければなりません。
(1) 傾ける前の推力 T' = mg
(2) 傾けた後の推力 T"cosΦ = mg ∴ T" = mg / cosΦ
(3) 推力の比率 T"/T' =( mg / cosΦ)/mg = 1/cosΦ
直感的にも分かりますが、式を見ても傾けた分だけ推力をアップする必要があるのが分かります。次はドローンのシステム系を考慮した機体制御について学習をしたいと思います。
(^_^)/~

")
![New HobbyFans CC3D QAV250 DIY Drones FPV Carbon Glass 6 x 4.5 Propeller SimonK 12A ESC by Hobbyfans [並行輸入品]](https://images-fe.ssl-images-amazon.com/images/I/51gS38pN53L._SL160_.jpg "New HobbyFans CC3D QAV250 DIY Drones FPV Carbon Glass 6 x 4.5 Propeller SimonK 12A ESC by Hobbyfans [並行輸入品]")
まずは上下動作です。上下動作の場合は簡単に理解できます。ドローンの4つのモーターの出力を同時に上げ下げするだけで解決です。
次に回転動作。回転動作はモーターの回転力を使います。同じ方向のモーターの出力を上げ、反対方向のモーターの出力を下げることで回転力が生まれます。
ただ、このとき推力の合計(T1+T2+T3+T4)が機体の重さを一致していないと、回転動作中に機体が上下にぶれることになるので注意が必要です。
最後は上下左右の動作です。上下左右にスライドして動くにはドローンの場合、機体を傾けなければなりません。今回は左に動く場合を考えてみます。傾ける角度はΦとします。
この場合の制御は少し難しいですね。傾けた分だけ横向きの推力(TsinΦ)が生まれますが、上向きの推力(TcosΦ)は、機体の重さと釣り合っている必要があります。なので傾ける前よりも 推力をアップさせなければなりません。
(1) 傾ける前の推力 T' = mg
(2) 傾けた後の推力 T"cosΦ = mg ∴ T" = mg / cosΦ
(3) 推力の比率 T"/T' =( mg / cosΦ)/mg = 1/cosΦ
直感的にも分かりますが、式を見ても傾けた分だけ推力をアップする必要があるのが分かります。次はドローンのシステム系を考慮した機体制御について学習をしたいと思います。
(^_^)/~
Building Your Own Drones: A Beginners' Guide to Drones, UAVs, and ROVs
- 作者: John Baichtal
- 出版社/メーカー: Que Publishing
- 発売日: 2015/09/14
- メディア: ペーパーバック
- 出版社/メーカー: Maker Media, Inc
- 発売日: 2016/04/22
- メディア: Kindle版
- 出版社/メーカー: HobbyFans
- メディア: おもちゃ&ホビー
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me



コメント 0