ドローンのシステム基礎を学ぶ(1) [ロボット]
ドローンのシステムに興味を持った俺氏。ソースコードを見てもよく分からないので、ドローンのシステム基礎を学ぶことにしました。教科書はこちらのサイト。
世の中には様々なドローンがありますが、代表的な四つのモーターを使ったクワッドコプター考えてみます。クワッドコプターには(X)型と(+)型の二つがあります。機体が回転しないように隣り合うモーターは互いに逆回転である必要があります。
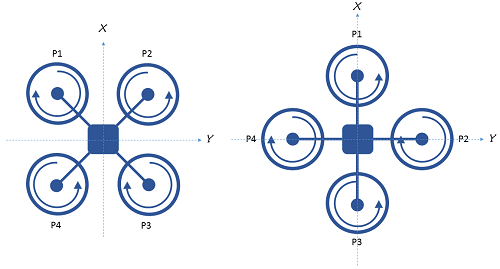
(X)型と(+)型では、X方向、Y方向に移動するときのモーターの制御方法が異なります。今回は一般的で実用的な(X)型について考えてみたいと思います。
(X)型のプロペラP1,P2,P3,P4から出る推力(Throttole)を T1, T2, T3, T4 と定義します。またその時のモータートルクを ω1, ω2, ω3, ω4 と定義します。
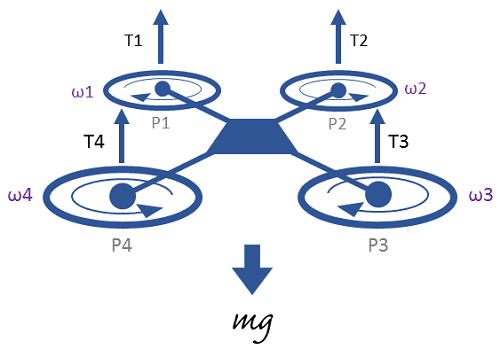
ホバリング状態にある時は、推力の合計がドローンの重さ(mg) と釣り合っていることが必要です。
T1 + T2 + T3 + T4 = mg
また回転しないようにするには、それぞれのモーターのトルクが釣り合っている必要があります。
(ω1 + ω3) - (ω2 + ω4) = 0
力学的に重要な公式はこれらの二つになります。次はクワッドコプターの座標系について考えてみたいと思います。
(^_^)/~

")
![HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]](https://images-fe.ssl-images-amazon.com/images/I/41qVIQ7kEaL._SL160_.jpg "HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]")
世の中には様々なドローンがありますが、代表的な四つのモーターを使ったクワッドコプター考えてみます。クワッドコプターには(X)型と(+)型の二つがあります。機体が回転しないように隣り合うモーターは互いに逆回転である必要があります。
(X)型と(+)型では、X方向、Y方向に移動するときのモーターの制御方法が異なります。今回は一般的で実用的な(X)型について考えてみたいと思います。
(X)型のプロペラP1,P2,P3,P4から出る推力(Throttole)を T1, T2, T3, T4 と定義します。またその時のモータートルクを ω1, ω2, ω3, ω4 と定義します。
ホバリング状態にある時は、推力の合計がドローンの重さ(mg) と釣り合っていることが必要です。
T1 + T2 + T3 + T4 = mg
また回転しないようにするには、それぞれのモーターのトルクが釣り合っている必要があります。
(ω1 + ω3) - (ω2 + ω4) = 0
力学的に重要な公式はこれらの二つになります。次はクワッドコプターの座標系について考えてみたいと思います。
(^_^)/~
Building Your Own Drones: A Beginners' Guide to Drones, UAVs, and ROVs
- 作者: John Baichtal
- 出版社/メーカー: Que Publishing
- 発売日: 2015/09/14
- メディア: ペーパーバック
- 作者:
- 出版社/メーカー: Maker Media, Inc
- 発売日: 2016/05/05
- メディア: ペーパーバック
HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]
- 出版社/メーカー: HPHELI
- メディア:
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me



色々考えてみました。
これでスマホアプリ作れないかなあ?
いや、スマホ空飛ばないし
別途プロペラデバイスを開発すれば良い
そもそもスマホ飛ばしてどうする?
じゃあシミュレーターだな
うわ3D表示めんどくさ
それ以前にドローン理論わからない、きーっ!
詰みました。。。
基礎講座、期待しております。(笑
by なめこ (2016-10-31 09:59)