ビュートローバ― H8 を動かしてみた [ロボット]
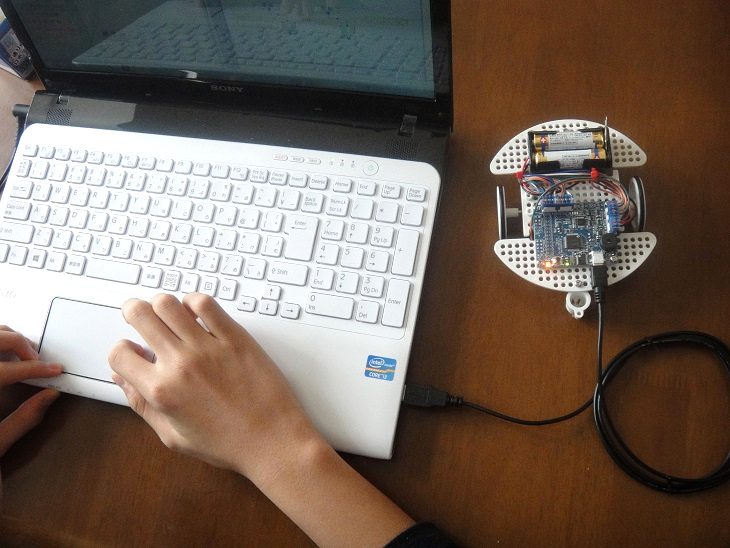
今日は、息子が『ビュートビルダー2』を使って、プログラミングにチャレンジしました。
正直、『ビュートビルダー2』に、あまり期待していなかったのですが、直感的に操作でき、プログラムの書き込みも簡単で出来はよさそうです。今回は、私は口を出さずに、息子にプログラミングを全て任せてみました。
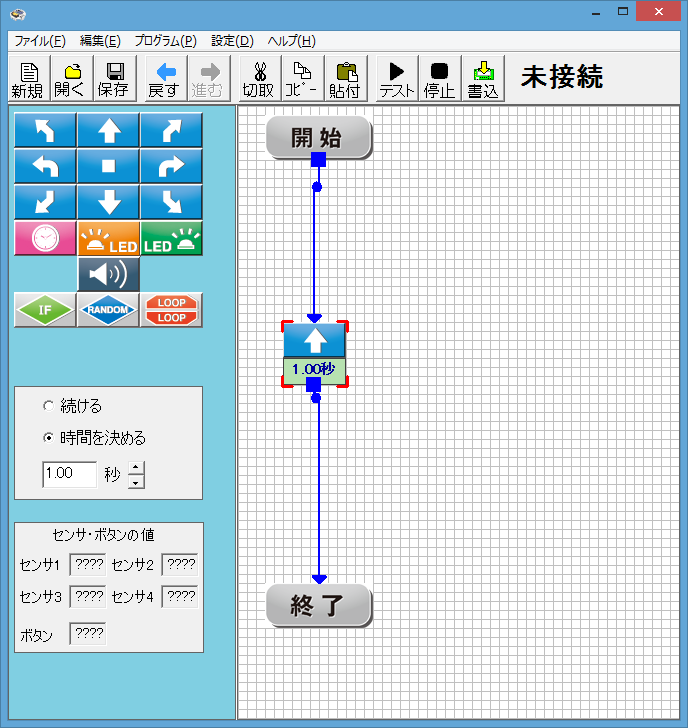
最初は、動作確認を兼ねて、直進動作の確認です。『ビュートビルダー2』でのプログラミングはいたってシンプルです。
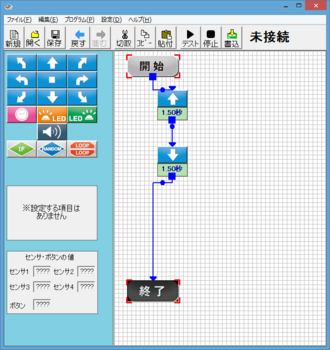
きちんと動作させることができました。配線は問題ないようです。
次に、転回動作の確認です。1秒間直進、2秒間右転回、1秒間後進する動作を無限に繰り返すように設定されています。
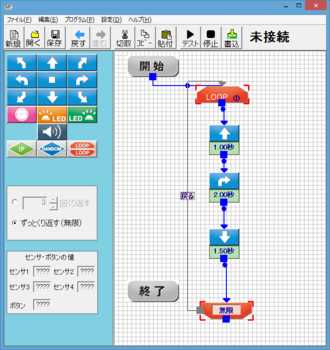
単純な記述でも、複雑な動作になるのが面白いですね。ルンバのようです。
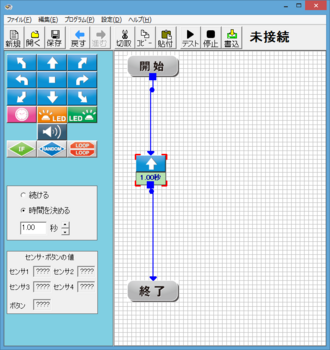
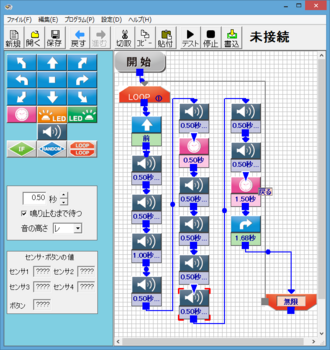
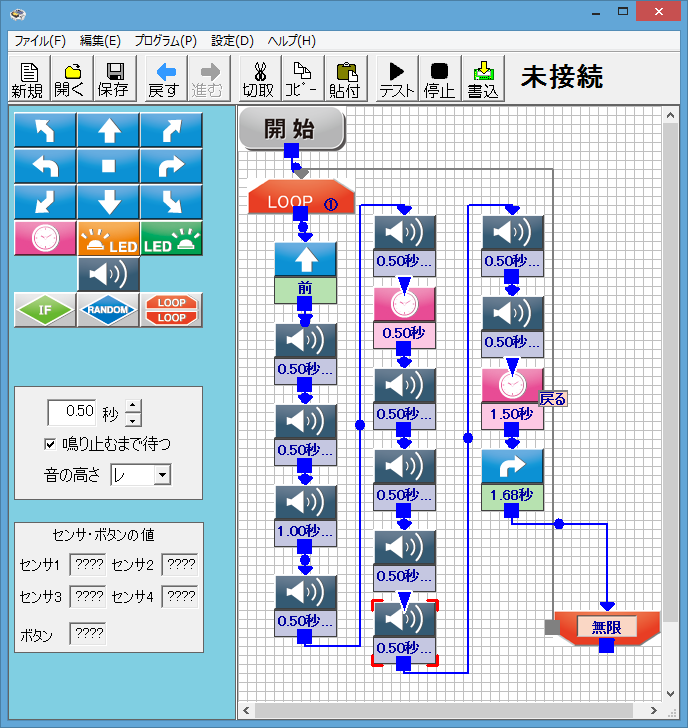
最後は、息子が考えた、”チャルメラの音楽を鳴らしながら、180転回して行ったり来たりする動作” です。180度転回動作をする時間の設定には、少し知恵を絞る必要があり、手を貸しました。
180度の転回動作するには、ビュートローバの車輪が描く円の長さの半分の距離を動かせばよいので、
転回動作時間 = (ビュートローバの描く半円の長さ)÷(ビュートローバが1秒間に進む距離)
と、もとまるはずです。ということで、ビュートローバが1秒間にすすむ距離を測定させました。
測定している姿がこちら。
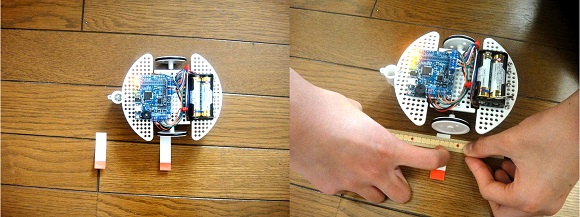
測定の結果、約9.1cm/秒でした。ビュートローバの車輪の幅は、9.75cmだったので、それで円周の長さが分かります。
ビュートローバの描く半円の長さ = 9.75cm×3.14÷2 = 15.31cm
ビュートローバが一秒間に進む距離 = 9.1cm
転回時間 = 15.31cm÷9.1cm/秒 = 1.68秒
ということで、1.68秒に設定しました。このあたりの計算がすらすらと出来るようになると、将来、楽しみなんですけどね。
実際の動作がこちらです。誤差が効いているみたいで、きれいに180度になっていないところが、少し悔しいところです。
ライントレースまでは、まだまだ先が長そうです。でも、息子の食いつきは非常に良くて、この他にもいろいろとプログラミングをして楽しんでいました。ビュートローバは、値段も手ごろですし、ロボットの楽しさを知るには、すごくよい教材ですね。(^_^)/~
関連記事
ビュートローバーH8 でライントレースしてみた
http://makers-with-myson.blog.so-net.ne.jp/2014-01-25
ビュートローバ― H8 に少し知恵をつけてみた
http://makers-with-myson.blog.so-net.ne.jp/2014-01-13
ビュートローバー H8 を組み立ててみた
http://makers-with-myson.blog.so-net.ne.jp/2014-01-11
ビュートローバ― H8 を買ってみた
http://makers-with-myson.blog.so-net.ne.jp/2014-01-07

< 教材ロボット >")
< 教材ロボット >")
正直、『ビュートビルダー2』に、あまり期待していなかったのですが、直感的に操作でき、プログラムの書き込みも簡単で出来はよさそうです。今回は、私は口を出さずに、息子にプログラミングを全て任せてみました。
最初は、動作確認を兼ねて、直進動作の確認です。『ビュートビルダー2』でのプログラミングはいたってシンプルです。
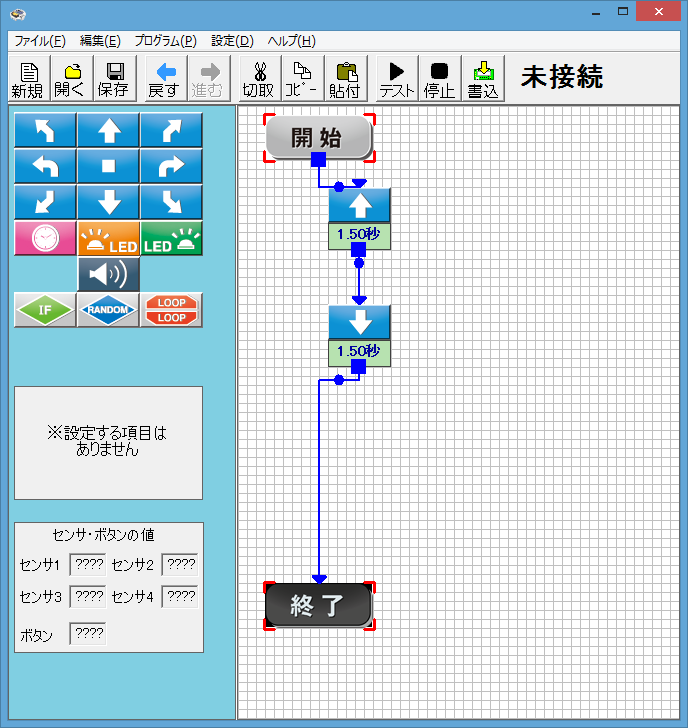
きちんと動作させることができました。配線は問題ないようです。
次に、転回動作の確認です。1秒間直進、2秒間右転回、1秒間後進する動作を無限に繰り返すように設定されています。
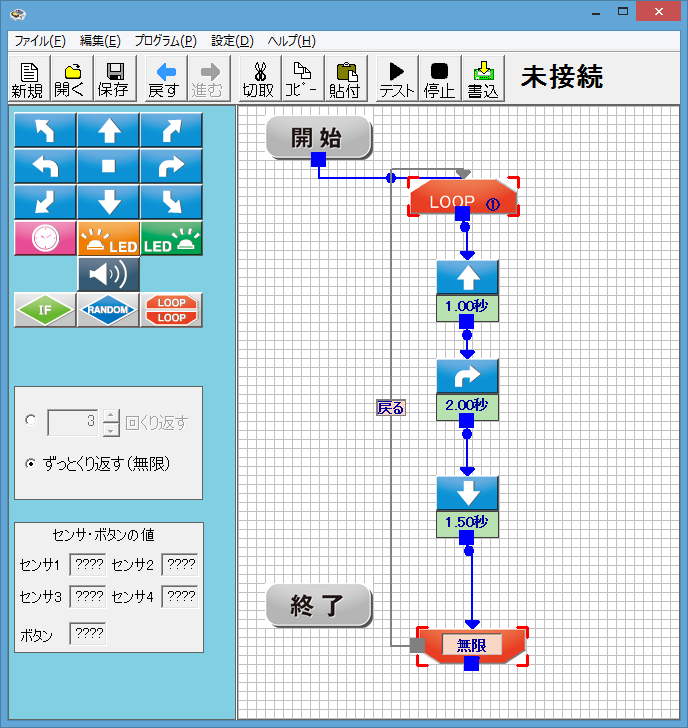
単純な記述でも、複雑な動作になるのが面白いですね。ルンバのようです。
最後は、息子が考えた、”チャルメラの音楽を鳴らしながら、180転回して行ったり来たりする動作” です。180度転回動作をする時間の設定には、少し知恵を絞る必要があり、手を貸しました。
180度の転回動作するには、ビュートローバの車輪が描く円の長さの半分の距離を動かせばよいので、
転回動作時間 = (ビュートローバの描く半円の長さ)÷(ビュートローバが1秒間に進む距離)
と、もとまるはずです。ということで、ビュートローバが1秒間にすすむ距離を測定させました。
測定している姿がこちら。
測定の結果、約9.1cm/秒でした。ビュートローバの車輪の幅は、9.75cmだったので、それで円周の長さが分かります。
ビュートローバの描く半円の長さ = 9.75cm×3.14÷2 = 15.31cm
ビュートローバが一秒間に進む距離 = 9.1cm
転回時間 = 15.31cm÷9.1cm/秒 = 1.68秒
ということで、1.68秒に設定しました。このあたりの計算がすらすらと出来るようになると、将来、楽しみなんですけどね。
実際の動作がこちらです。誤差が効いているみたいで、きれいに180度になっていないところが、少し悔しいところです。
ライントレースまでは、まだまだ先が長そうです。でも、息子の食いつきは非常に良くて、この他にもいろいろとプログラミングをして楽しんでいました。ビュートローバは、値段も手ごろですし、ロボットの楽しさを知るには、すごくよい教材ですね。(^_^)/~
関連記事
ビュートローバーH8 でライントレースしてみた
http://makers-with-myson.blog.so-net.ne.jp/2014-01-25
ビュートローバ― H8 に少し知恵をつけてみた
http://makers-with-myson.blog.so-net.ne.jp/2014-01-13
ビュートローバー H8 を組み立ててみた
http://makers-with-myson.blog.so-net.ne.jp/2014-01-11
ビュートローバ― H8 を買ってみた
http://makers-with-myson.blog.so-net.ne.jp/2014-01-07
- 出版社/メーカー: ヴイストン株式会社
- メディア: おもちゃ&ホビー
教材ロボット Beauto Racer (ビュート レーサー)< 教材ロボット >
- 出版社/メーカー: Vstone(ヴイストン株式会社)
- メディア: おもちゃ&ホビー
Beauto Balancer Duo(ビュートバランサーデュオ)< 教材ロボット >
- 出版社/メーカー: ヴイストン株式会社
- メディア: おもちゃ&ホビー
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me



ビュートローバー楽しそうですね。
6年くらい前に某大学の文化祭へ遊びに行ったときに、機械工学科の生徒が作った黒い線の上を走るローバーを見せてもらったことがあるのですが、今は学習用教材として普通に手に入るのですね!
組込用プログラムもScratchのような UI で、子どもにも理解し易く、楽しめますね。
私が子どもの頃にもこういうのがあれば、もう少し勉強を楽しめたのに。(^^;
by A216 (2014-01-13 13:44)
A216さん、コメントありがとうございます!
思いのほか、完成度がたかくて面白いです。息子もすっかり夢中になっています。いろいろなタイプがあるので、私も興味津々です。特に倒立型のビュートバランサーは面白そうです。A216さんもぜひ!
by ys_oota (2014-01-13 20:31)