極小モーターモジュールを実装その2 [ロボット]
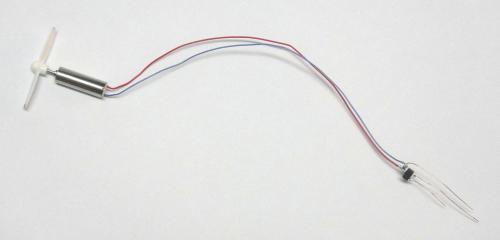
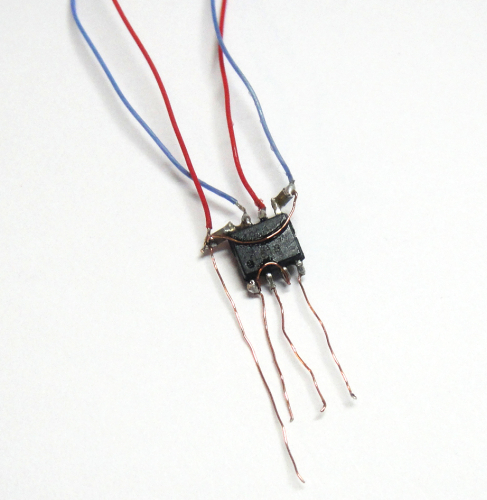
基本的な実装は前回と同じで、FETのドレインと電源ラインとの間に10uFのコンデンサを挟んでいます。いやー小さすぎてカメラで映してもピンボケしてしまいました。
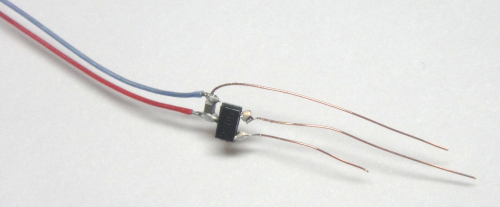
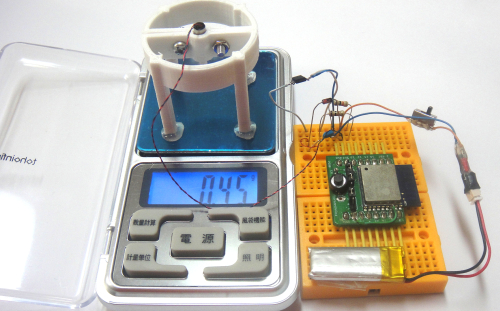
気になる重さは0.8g!前回はデュアルで1.70g だったので、0.1g 減量できたことになります。

しかし、これで一円玉よりも軽いんですよねー。我ながらすごいな・・・。
次はいよいよ電気系の組み上げです!
( ー`дー´)

uxcell RC飛行機DCコアレスマグネチックモーター 電子モーター 0.5mmシャフト径 3.7V 63000RPM 5個入り
- 出版社/メーカー: uxcell
- メディア: その他
 50種類 各30個 チップ 抵抗 + (2.2pf-1uf) 40種類 各20個 コンデンサ キット セット チップ レジスタ アソート キット パック")
10個 Nチャネルパワー MOSFET2N60 低ゲート電荷 2A 600V")
SODIAL(R)10個 Nチャネルパワー MOSFET2N60 低ゲート電荷 2A 600V
- 出版社/メーカー: SODIAL(R)
- メディア: エレクトロニクス
極小モーターモジュールを実装! [ロボット]
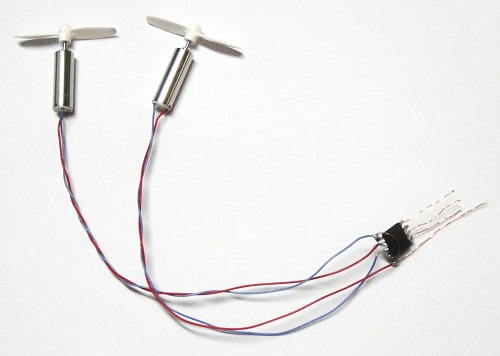
モータードライバはSI4900DYというデュアルNchFETを使いました。
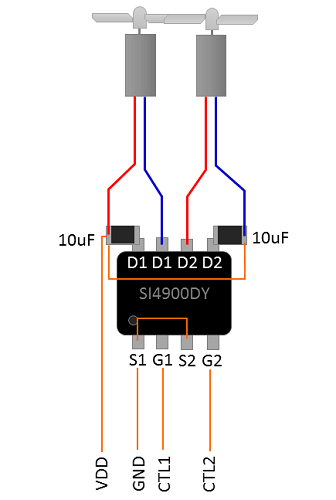
本来IC保護用のダイオードも必要ですが、小電力のコアレスモーターなので省いてしまいました。しかし、細かい。我ながら頑張ったなぁ。
重量は二つのモーターを合わせても1.70g!!うん、頑張った!

バッテリーを除いた電気系全体では、1.75g + 1.70g + 1.70g + α(半田+グルー)で、5.3g 位かなぁ。目標の10g以内はなんとかなりそう?
σ(=_ = )
uxcell RC飛行機DCコアレスマグネチックモーター 電子モーター 0.5mmシャフト径 3.7V 63000RPM 5個入り
- 出版社/メーカー: uxcell
- メディア: その他
SODIAL(R)10個 Nチャネルパワー MOSFET2N60 低ゲート電荷 2A 600V
- 出版社/メーカー: SODIAL(R)
- メディア: エレクトロニクス
軽量実装を検討してみた! [ロボット]

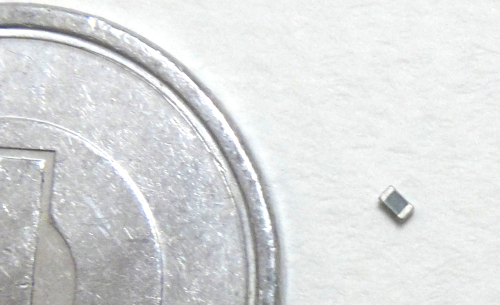
今回試してみるのは、0603のコンデンサー。すごく小さい部品です。
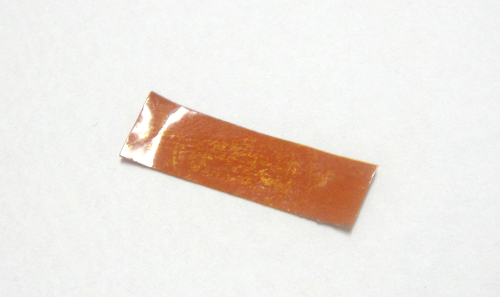
銅箔テープとカプトンテープを張り合わせます。銅箔テープ側はGNDや電源に使います。
穴をあけてポリウレタン銅線を通し、銅箔テープとはんだ付けします。
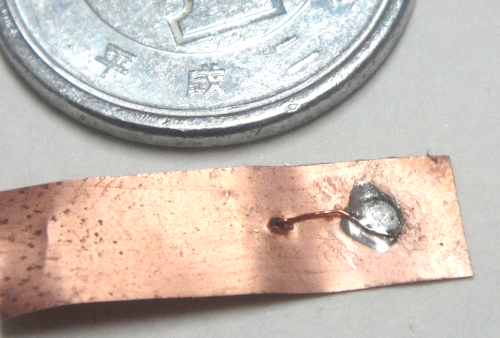
カプトンテープ側にコンデンサと銅線をはんだ付けをしてみました。最初はちょっと苦労しましたが、慣れてくると時間がかからず出来そうです。

全体重量は0.06g。これなら抵抗やコンデンサなど全体を組み上げても1gにもならないでしょう。

はんだ付けのときに威力を発揮したのが”はんだ付け用ペースト”。はんだ付け前にこて先に少しつけておくと、はんだがこて先にうまく乗ってはんだ付けしやすくなります。

あとは部品が揃うのを待つのみ。激安部品を手配したので中国からの空輸待ちです。部品が揃ったら、組上げに入りたいと思います。5月2日までに間に合うかなー。
σ( ̄ー ̄;
 電子工作の必需品 電子基板の金メッキが施されたエッジコネクタ・ゴールドフィンガーの保護に。")
HRTAPE-W10L30 : ポリイミド絶縁耐熱テープ (幅10mm、長さ30m) 電子工作の必需品 電子基板の金メッキが施されたエッジコネクタ・ゴールドフィンガーの保護に。
- 出版社/メーカー: ビープラス・テクノロジー
- メディア: エレクトロニクス

送料無料【エナメル線】2UEW 2種 ポリウレタン銅線 0.2mm 20m
- 出版社/メーカー: サンコー電商
- メディア:

- 出版社/メーカー: スクエア
- メディア: おもちゃ&ホビー
プロペラの推力を測定をしてみた!(2) [ロボット]
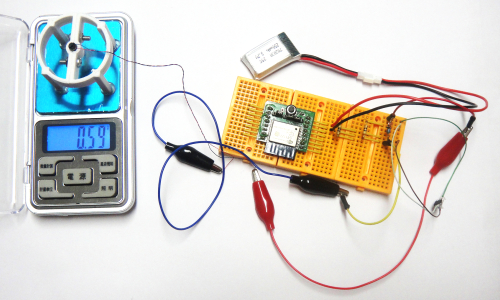
こちらが今回の測定結果です。青いのが今回のバッテリで測定した結果で、オレンジが前回の結果です。前回にくらべて若干推力があがっていますが、思ったほど向上していません。
これがこのモーターの限界なのかなぁ・・・。
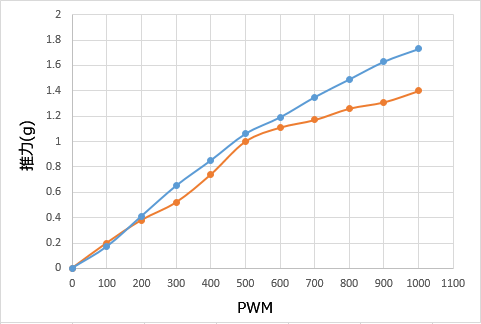
だいたい1.7g と少しなので、4つで7gくらい。これではバッテリーを持ち上げるのも厳しいかも。測定方法の問題ということも考えられるので、とにかく組み上げてみて試してみたいと思います。案ずるより産むが易し!
σ(-`ω´-;)
")
ESPr Developer(ESP-WROOM-02開発ボード)
- 出版社/メーカー: スイッチサイエンス
- メディア: エレクトロニクス
uxcell RC飛行機DCコアレスマグネチックモーター 電子モーター 0.5mmシャフト径 3.7V 63000RPM 5個入り
- 出版社/メーカー: uxcell
- メディア: その他
 0.01g-500g精密 業務用(プロ用) 電子 はかり")
IDAODAN 携帯タイプ ポケットデジタル スケール(秤) 0.01g-500g精密 業務用(プロ用) 電子 はかり
- 出版社/メーカー: IDAODAN
- メディア: ホーム&キッチン
ミニドローンを買ってみた! [ロボット]
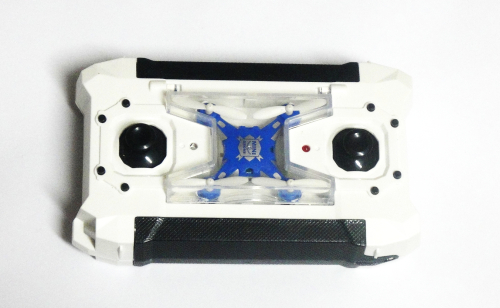
おもちゃなのでさすがにプロポは安っぽいです。しかしこのミニドローン、いっちょ前にモード2だけでなくモード1もサポートしているようです。使う気にはなりませんが。。。
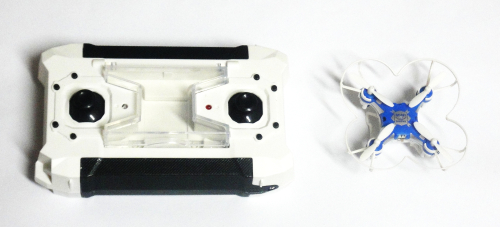
アップにしてみると、なかなかカッコいいですね。

試運転の様子は、そのうち披露したいと思います。
(^_^)/~
")
FQ777 Pocket drone ラジコンヘリコプター 室内用 ヘッドレスモード搭載 ミニクワッドコプター ミニマルチコプター ドローン リモート360°飛行 (ブルー)
- 出版社/メーカー: Cheerson
- メディア:

GoolRC CX-10W 4CH 6軸ジャイロ Wifi ミニ ドローン カメラ付 シルバー
- 出版社/メーカー: GoolRC
- メディア: おもちゃ&ホビー
3級4級対応 改正航空法・完全対応版 (ドローン検定協会)")
ドローンの教科書 標準テキスト - 無人航空従事者試験(ドローン検定)3級4級対応 改正航空法・完全対応版 (ドローン検定協会)
- 作者: 山下 壱平
- 出版社/メーカー: デジテックブックス
- 発売日: 2016/11/23
- メディア: 単行本(ソフトカバー)
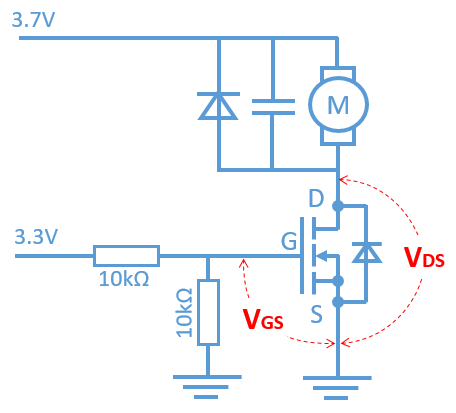
ESP8266で駆動しているFET(モータードライバ)を測定してみた [ロボット]
測定するのは、FETのゲートとソースの間、ドレインとソースの間の電圧です。
実際に測定をしてみた結果がこちらです。
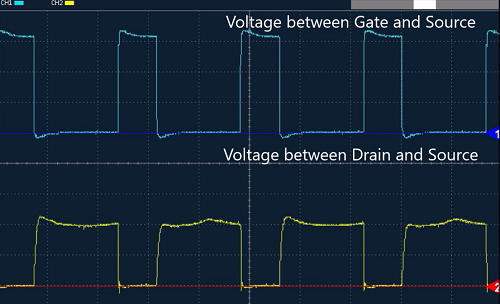
動画だとPWMで変化している様子がよく分かります。
電圧を見る限り特段おかしなところはありません。デューティ100%になったときのドレインとソースの電圧を見てみます。

だいたい 0.01V。ちょっと低すぎる感じがします。データシートを見てみます。VDSが0.01Vで、VGSが3.1Vくらいになります。
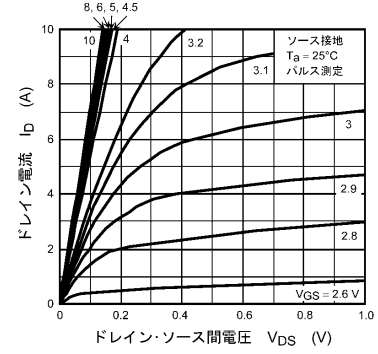
データシートから類推するに、ほとんど電流が流れていないということになります。推力のサチりはどうも、バッテリーが原因っぽいですね。
ε~(=. = )

サインスマート 手持型 USBオシロスコープ DDS-140 バンド幅40MHz 200M/S + 信号発生器 + ロジックアナライザ
- 出版社/メーカー: サインスマート(SainSmart)
- メディア: エレクトロニクス

Hantek デジタルオシロスコープ 70MHz 1GSa/s DSO-5072P
- 出版社/メーカー: Hantek
- メディア: エレクトロニクス
SODIAL(R)10個 Nチャネルパワー MOSFET2N60 低ゲート電荷 2A 600V
- 出版社/メーカー: SODIAL(R)
- メディア: エレクトロニクス
プロペラの推力を測定をしてみた! [ロボット]
動画で見ると変化の様子が、よく分かります。
PWMのレンジは0-1000までを設定し、100ずつ変更して測定をしてみました。その結果がこちら。
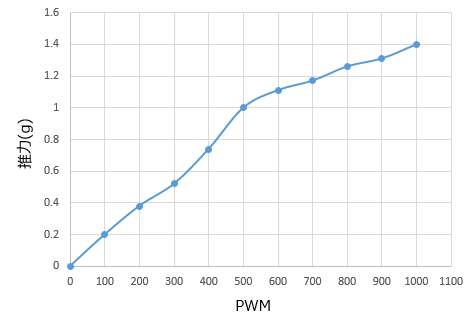
最大でも1.4g程度。推力なさすぎ。。。OTZ... デューティ比50%を過ぎると推力がダウンしてしまっています。モータードライバーの使い方が悪いのかも知れません。もう少し調査が必要そうです。
ε=(-. ー )
ESPr Developer(ESP-WROOM-02開発ボード)
- 出版社/メーカー: スイッチサイエンス
- メディア: エレクトロニクス
uxcell RC飛行機DCコアレスマグネチックモーター 電子モーター 0.5mmシャフト径 3.7V 63000RPM 5個入り
- 出版社/メーカー: uxcell
- メディア: その他
")
- 出版社/メーカー: G-FORCE(ジーフォース)
- メディア: おもちゃ&ホビー
ドローンのシステム基礎を学ぶ(13) [ロボット]
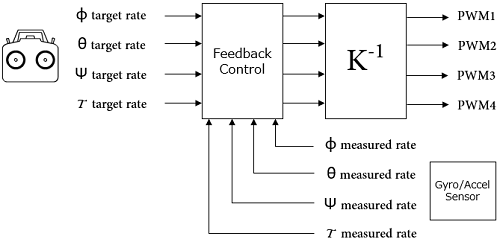
しかし冷静に考えると、プロポでヨーの速度(Z軸回転:ψ)を設定するのはなんとなく分かりますが、ロール速度(X軸回転:Φ)、ピッチ速度(Y軸回転:θ)をプロポで設定するのは至難の業です。
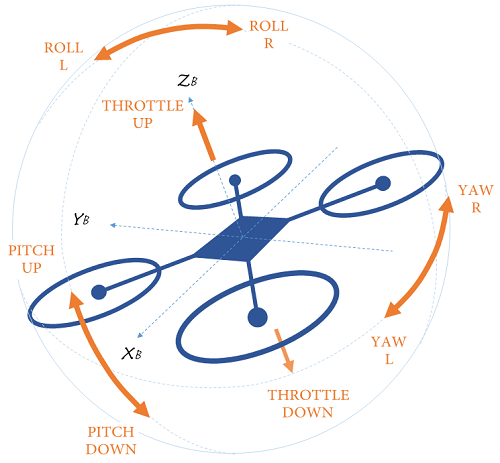
プロポからはロール(Φ)、ピッチ(θ)の目標角度を設定するのが現実的です。ということで、システム図をロール(Φ)、ピッチ(θ)の目標角度を設定するように変更してみました。
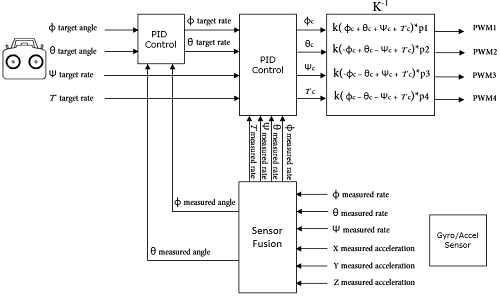
基本的な構成は二段階PID制御システムになります。目標角度(target angle)と測定角度(measured angle)から、目標角速度(target rate)をPID制御を使って算出し、それを後段のPID制御ブロックに渡してPWM値を求めます。
ここで、測定角度(measured angle)を算出には、ジャイロセンサーと加速度センサーを用いたセンサーフュージョンを使います。
センサーフュージョンは下記のような算出式と、DCM(Direction Cosign Matrix)もしくはQuaternion、Kalman Filter などのアルゴリズムで構成されています。
// preΦg、preθg、preψg は前回の測定角度 // Δt はジャイロセンサーの測定間隔 Φa = arctan(-ay/-az) θa = arctan(ax/√(ay*ay + az*az)) Φg = preΦg + (Φ measured rate) * Δt θg = preθg + (θ measured rate) * Δt ψg = preψg + (ψ measured rate) * Δt
センサーフュージョンは、最近は各センサーメーカーから提供されていることが多いので、利用するにあたって詳細まで知る必要はありません。
これで基本的な理論背景はだいたい整ったかな。あとは実践しながら考えていきたいと思います。
p(^ー^)q
 GY-521 MPU-60503軸ジャイロ+3軸加速度センサ")
SODIAL(R) GY-521 MPU-60503軸ジャイロ+3軸加速度センサ
- 出版社/メーカー: SODIAL(R)
- メディア: Personal Computers
![ArduPilot -UAV Controller w/ ATMega328 [並行輸入品]](https://images-fe.ssl-images-amazon.com/images/I/51YCkMkYrnL._SL160_.jpg "ArduPilot -UAV Controller w/ ATMega328 [並行輸入品]")
ArduPilot -UAV Controller w/ ATMega328 [並行輸入品]
- 出版社/メーカー: SHANHAI
- メディア: エレクトロニクス

Building Your Own Drones: A Beginners' Guide to Drones, UAVs, and ROVs
- 作者: John Baichtal
- 出版社/メーカー: Que Publishing
- 発売日: 2015/09/14
- メディア: ペーパーバック
実証試験用のモーターとプロペラを購入 [ロボット]

あとはマイコンとモータードライバを決めて、6軸センサーのMPU6050をつければ電気部品はそろいます。筐体はなんで作ろうかなぁ・・・悩む。
(^_^;
uxcell RC飛行機DCコアレスマグネチックモーター 電子モーター 0.5mmシャフト径 3.7V 63000RPM 5個入り
- 出版社/メーカー: uxcell
- メディア: その他
- 出版社/メーカー: G-FORCE(ジーフォース)
- メディア: おもちゃ&ホビー
 MPU-6050 3軸ジャイロスコープ モジュール for Arduino")
サインスマート(SainSmart) MPU-6050 3軸ジャイロスコープ モジュール for Arduino
- 出版社/メーカー: サインスマート(SainSmart)
- メディア: エレクトロニクス
ドローンのシステム基礎を学ぶ(12) [ロボット]
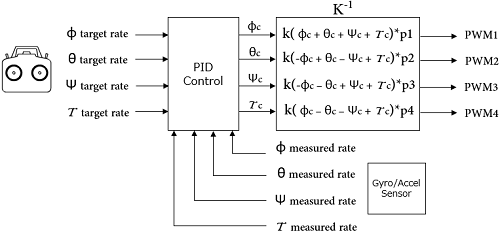
この時K(-1) は、下記のように表現できます。詳しくはこちらを参照してください。
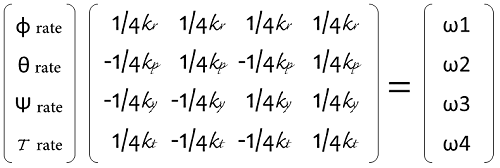
これにPID制御を加えると下記のようになります。システムを簡単化するために、Kr = Kp = Ky = Kt = 1/4k としました。また、p1, p2, p3, p4 はそれぞれのモーターのばらつきを補正する係数です。
次はこれがどのようなプログラムになるのか確認してみたいと思います。
(^_^)/~
Building Your Own Drones: A Beginners' Guide to Drones, UAVs, and ROVs
- 作者: John Baichtal
- 出版社/メーカー: Que Publishing
- 発売日: 2015/09/14
- メディア: ペーパーバック

ジーフォース G-FORCE PXY CAM ドローン オレンジ・GB301 1067656 【1点】
- 出版社/メーカー: UNderSell(アンダーセル)
- メディア: ホーム&キッチン
![HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]](https://images-fe.ssl-images-amazon.com/images/I/41qVIQ7kEaL._SL160_.jpg "HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]")
HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]
- 出版社/メーカー: HPHELI
- メディア:
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me


