ドローンのシステム基礎を学ぶ(12) [ロボット]
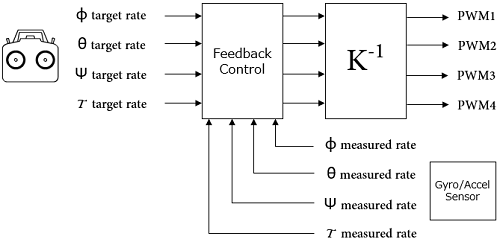
前回まで、PID制御の基礎理論について学びました。今回はこれをドローンに応用したいと思います。ドローンの制御系を振り返ってみます。詳しくはこちらを参照してください。
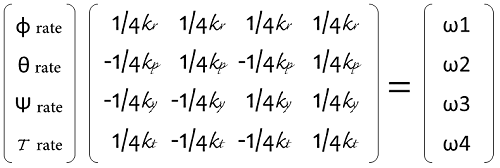
この時K(-1) は、下記のように表現できます。詳しくはこちらを参照してください。
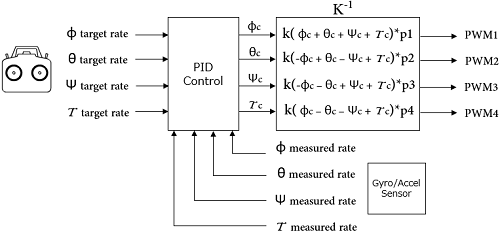
これにPID制御を加えると下記のようになります。システムを簡単化するために、Kr = Kp = Ky = Kt = 1/4k としました。また、p1, p2, p3, p4 はそれぞれのモーターのばらつきを補正する係数です。
次はこれがどのようなプログラムになるのか確認してみたいと思います。
(^_^)/~


![HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]](https://images-fe.ssl-images-amazon.com/images/I/41qVIQ7kEaL._SL160_.jpg "HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]")
この時K(-1) は、下記のように表現できます。詳しくはこちらを参照してください。
これにPID制御を加えると下記のようになります。システムを簡単化するために、Kr = Kp = Ky = Kt = 1/4k としました。また、p1, p2, p3, p4 はそれぞれのモーターのばらつきを補正する係数です。
次はこれがどのようなプログラムになるのか確認してみたいと思います。
(^_^)/~
Building Your Own Drones: A Beginners' Guide to Drones, UAVs, and ROVs
- 作者: John Baichtal
- 出版社/メーカー: Que Publishing
- 発売日: 2015/09/14
- メディア: ペーパーバック
ジーフォース G-FORCE PXY CAM ドローン オレンジ・GB301 1067656 【1点】
- 出版社/メーカー: UNderSell(アンダーセル)
- メディア: ホーム&キッチン
HPHELI Batfly 250 Quad Racer Drone DIY Kit [並行輸入品]
- 出版社/メーカー: HPHELI
- メディア:
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me



コメント 0