MPU6050 の Digital Motion Processor の性能を試してみた(5) [Arduino]
前回、MPU6050 のオフセットを解消するためのフィルターを考えてみました。今回はその性能を試してみたいと思います。
フィルターなしの場合は、動きを与えたあとにオフセットが発生していました。
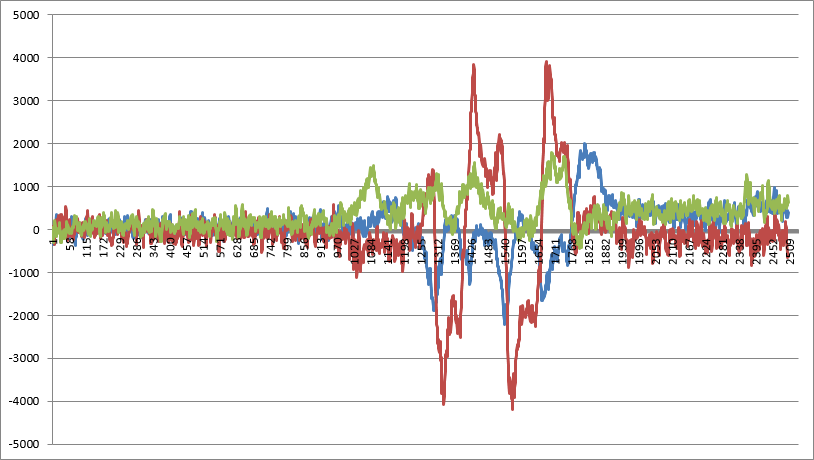
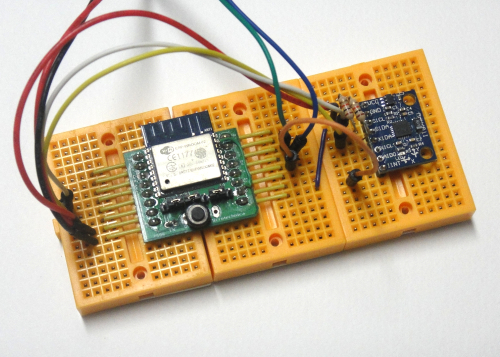
今回、64サンプルのフィルターを使ってデータを取得してみました。センサーを左右に大きく振ってみました。
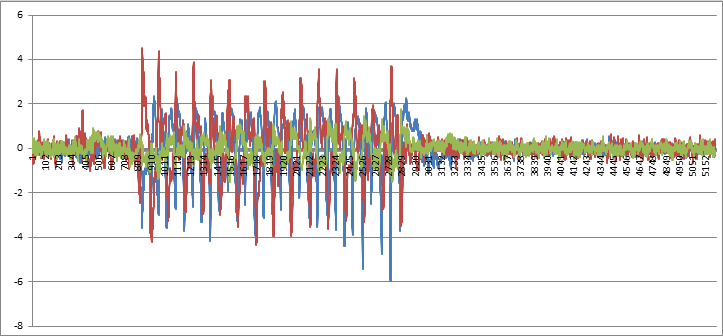
フィルターのおかげでオフセットはキャンセルされています。うまくいきました。このデータから速度のデータを算出してみました。
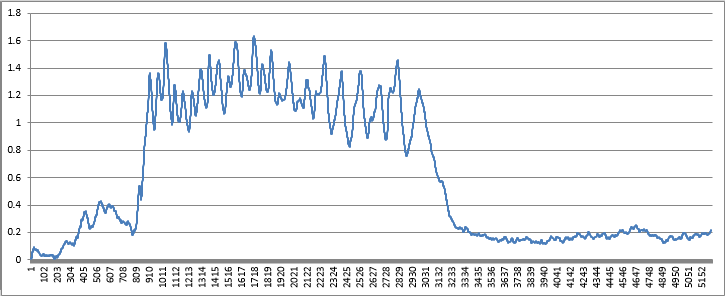
だいたい1.2m/sec。左右の振り幅は1mくらいなので、感覚的になんとなく合っています。次に距離を計算してみました。左右に大きく30回振りましたので、だいたい30m位のはずです。
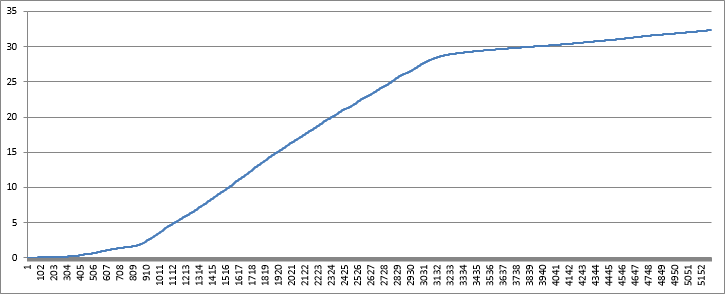
悪くないデータになりましたが、静止状態でもずるずると距離が伸びてしまっています。加速度データの正負の値が一致していないので、差し引きで速度が残ってしまっています。これ位はしょうがないレベル?悩む。
(。-`ω´-)ンー

")
")
フィルターなしの場合は、動きを与えたあとにオフセットが発生していました。
今回、64サンプルのフィルターを使ってデータを取得してみました。センサーを左右に大きく振ってみました。
フィルターのおかげでオフセットはキャンセルされています。うまくいきました。このデータから速度のデータを算出してみました。
だいたい1.2m/sec。左右の振り幅は1mくらいなので、感覚的になんとなく合っています。次に距離を計算してみました。左右に大きく30回振りましたので、だいたい30m位のはずです。
悪くないデータになりましたが、静止状態でもずるずると距離が伸びてしまっています。加速度データの正負の値が一致していないので、差し引きで速度が残ってしまっています。これ位はしょうがないレベル?悩む。
(。-`ω´-)ンー
- 出版社/メーカー: スイッチサイエンス
- メディア: エレクトロニクス
ESPr Developer(ESP-WROOM-02開発ボード)
- 出版社/メーカー: スイッチサイエンス
- メディア: エレクトロニクス
実践ディジタル・フィルタ設計入門―JavaアプレットとC++プログラムを使った (ディジタル信号処理シリーズ)
- 作者: 岩田 利王
- 出版社/メーカー: CQ出版
- 発売日: 2004/10
- メディア: 単行本
ys_taro さん

-
nice! 35196
記事 1099
テーマ 趣味・カルチャー
プロフィール
Contact Me



コメント 0